数据结构实验课程设计报告求工程的最短完成时间_(1)用字符文件提供数据建立aoe网络邻接表存储结构; (2)编写程序,实现图中顶点的-程序员宅基地
技术标签: 数据结构
1.课程设计内容与要求
用字符文件提供数据建立AOE网络的存储结构。编写程序,计算并输出工程的最短完成时间。
实验目的:掌握图的存储结构;掌握图的拓扑排序算法以及AOE网络顶点最早开始时间的计算方法。
1.课程设计内容与要求
用字符文件提供数据建立AOE网络的存储结构。编写程序,计算并输出工程的最短完成时间。
实验目的:掌握图的存储结构;掌握图的拓扑排序算法以及AOE网络顶点最早开始时间的计算方法。
- 程序设计报告
程序采用C++语言进行开发,完成用字符文件提供数据建立AOE网络的存储结构,计算并输出工程的最短完成时间。
-
- 总体设计
程序使用邻接表结构来存储图数据结构,借助栈数据结构完成对图的正逆拓扑排序,并求出个顶点的最早开始时间和最晚开始时间,最后计算并输出工程的最短完成时间。
执行过程如下:
关于拓扑排序,先初始化两个存储int类型下标的栈,st用于存储入度为0的点,topOrder用于存储拓扑排序的顺序,先将所有入度为0的点存入st中,若栈st中存在入度为0的结点,则继续进行拓扑排序,从栈顶弹出一个图中的顶点,存入topOrder中,遍历该顶点的所有邻接点, 先使所有邻接点的入度减一(逻辑上做删除操作),判断入度是否为0,为0则压入栈st中,如果邻接点事件的的最早发生时间小于当前顶点事件的最早发生时间加上当前顶点到邻接点的权值,则将邻接点的最早发生时间更新为当前顶点事件的最早发生事件加上两点间活动持续时间。将栈topOrder中的元素依次弹出,获得拓扑排序的逆序列,求解last数组,初始化所有事件的最迟开始时间数组last为汇点的最早发生时间,获取栈顶元素并遍历当前顶点的所有临接点,如果邻接点事件的最晚发生时间大于当前顶点事件的最晚发生时间减去当前顶点到邻接点的权值,则将邻接点的最晚发生时间更新为当前顶点事件的最晚发生时间减去两点间活动持续时间。
求解关键路径,就是遍历当前顶点的邻接点,如果最早发生时间和最晚发生时间相同的话,说明当前活动是关键活动,则输出当前活动,并从p->adjVertex出发寻找下一个关键活动,当前顶点事件邻接点的最晚开始时间减去当前活动[u, p -> adjacencyVertex]的权值就是当前活动的最晚开始时间,求得一关建路径后退出。
-
- 详细数据结构设计
- 邻接表存储结构
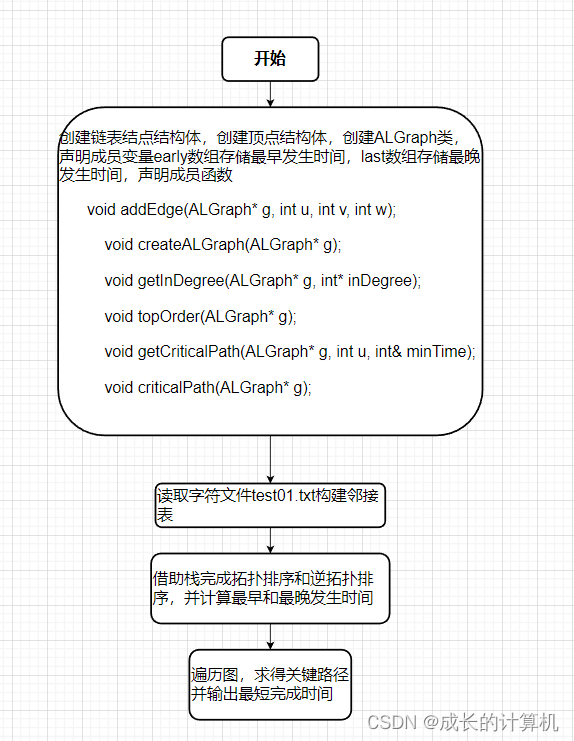
创建链表结点的结构体ArcNode,
成员变量int adjVertex,为该弧所指向的顶点的位置,
int weight表示有向边的路径长度(权值),
struct ArcNode* nextArc;指向下一个和头结点存在有向边的链表结点。
创建顶点结点结构体VertexNode,
成员变量,char data 存储结点上的数据,
ArcNodePtr firstArc,指向该顶点结点的第一个链表结点。
2.创建ALGraph类
成员变量:AdjList vertexes,表示图,early数组记录每个事件的最早发生时间,last数组记录每个事件的最晚发生时间。vexNum表示图中顶点的数量,arcNum表示边的数量,minTime表示工程的最短完成时间。
再定义一系列相关的成员函数,
void addEdge(ALGraph* g, int u, int v, int w);
用头插法在编号为u, v的顶点间增加一条边。
void createALGraph(ALGraph* g);
从文件输入中创建邻接表存储的有向图。
void getInDegree(ALGraph* g, int* inDegree);
求图中每个顶点的入度。
void topOrder(ALGraph* g);
拓扑排序求early和last。
void getCriticalPath(ALGraph* g, int u, int& minTime);
求解关键路径。
void criticalPath(ALGraph* g);
求解最短完成时间。
3.输入文件test01.txt格式
9 11 (结点数 边数)
0 1 6 (结点序号, 邻接点, 有向边的权值)
......
7 8 4 (共9个)
4.输出在屏幕上的信息
early数组和last数组的值,关键路径与工程完成所需的最短时间。
-
- 详细算法设计
- 拓扑排序算法
getInDegree(g, inDegree);求每个顶点的入度数组inDegree,
for (int i = 0; i < g->vexNum; ++i)
if (!inDegree[i]) st.push(i);先将所有入度为0的点存入st中,
while (!st.empty()) { 若栈st中存在入度为0的结点,则继续进行拓扑排序,
int curVex = st.top();
topOrder.push(curVex);
st.pop();
遍历该顶点的所有邻接点
for (ArcNodePtr p = g->vertexes[curVex].firstArc; p != nullptr; p = p->nextArc) {
先使所有邻接点的入度减一(逻辑上做删除操作)
if (!(--inDegree[p->adjVertex]))
如果入度减一后该邻接点的入度为0,则加入栈st中作为下一次排序的起点
st.push(p->adjVertex);
如果邻接点事件的的最早发生时间小于当前顶点事件的最早发生时间加上当前顶点到邻接点的权值,则将邻接点的最早发生时间更新为当前顶点事件的最早发生事件加上两点间活动持续时间,
if (early[curVex] + p->weight > early[p->adjVertex])
early[p->adjVertex] = early[curVex] + p->weight;}}
for (int i = 0; i < g->vexNum; i++) 初始化所有事件的最迟开始时间数组last为汇点的最早发生时间,
last[i] = early[g->vexNum - 1];
while (!topOrder.empty()) {
int curVex = topOrder.top();
topOrder.pop();
for (ArcNodePtr p = g->vertexes[curVex].firstArc; p; p = p->nextArc) {
如果邻接点事件的最晚发生时间大于当前顶点事件的最晚发生时间减去当前顶点到邻接点的权值, 则将邻接点的最晚发生时间更新为当前顶点事件的最晚发生时间减去两点间活动持续时间。
if (last[p->adjVertex] - p->weight < last[curVex])
last[curVex] = last[p->adjVertex] - p->weight;}}
算法复杂度:对有n个顶点和e条弧的有向图而言,建立求各顶点的入度的时间复杂度为O(e);建零入度顶点栈的时间复杂度为O(n);在拓扑排序过程中,若有向图无环,则每个顶点进一次栈、出一次栈,入度减1的操作在while语句中总共执行e次,所以总的时间复杂度为O(n+e)。 拓扑排序初始参数只有邻接表,所以第一步建立入度数组,因为每1入度对应一条弧,总共e条弧,建立入度数组的复杂度为O(e)。每个节点输出一次,n个节点遍历一次,时间复杂度为O(n)。然后节点入度减1的操作,也是一条弧对应一次,e条弧总共O(e)。即对每条弧要建立入度数组操作和删除操作,每个顶点要遍历一次并删除。故时间复杂度为O(n+e)。
- 求解关键路径
遍历当前顶点u的所有邻接点
for (ArcNodePtr p = g->vertexes[u].firstArc; p != nullptr; p = p->nextArc) {
如果最早发生时间和最晚发生时间相同的话,说明当前活动是关键活动,则输出当前活动,并从p->adjVertex出发寻找下一个关键活动, 当前顶点事件邻接点的最晚开始时间减去当前活动[u, p -> adjacencyVertex]的权值就是当前活动的最晚开始时间,
if (early[u] == last[p->adjVertex] - p->weight) {
minTime += p->weight;
vec.push_back(u); 将关键活动存入vec中,
vec.push_back(p->adjVertex);
getCriticalPath(g, p->adjVertex, minTime);递归寻找下一个关键活动
找到一条关键路径,结束循环
break;}}
算法时间复杂度为:O(n+e)。
#define _CRT_SECURE_NO_WARNINGS 1
#include<iostream>
#include<fstream>
#include<stack>
#include<vector>
using namespace std;
#define MAX_VERTEX_NUM 20
// 链表结点
typedef struct ArcNode {
// 该弧所指向的顶点的位置
int adjVertex;
// 有向边的路径长度(权值)
int weight;
// 下一个和头结点存在有向边的链表结点
struct ArcNode* nextArc;
}ArcNode, * ArcNodePtr;
// 顶点结点
typedef struct VertexNode {
// 存储结点上的数据
char data;
// 指向该顶点结点的第一个链表结点
ArcNodePtr firstArc;
}AdjList[MAX_VERTEX_NUM];
class ALGraph
{
public:
ALGraph() = default;
// early数组记录每个事件的最早发生时间
int early[MAX_VERTEX_NUM] = { 0 };
// last数组记录每个事件的最晚发生时间
int last[MAX_VERTEX_NUM] = { 0 };
// 存储图上所有顶点的数组
AdjList vertexes;
// 图中顶点的数量、边的数量
int vexNum, arcNum;
// 定义minTime表示工程的最短完成时间
int minTime = 0;
vector<int> vec ;
void addEdge(ALGraph* g, int u, int v, int w);
void createALGraph(ALGraph* g);
void getInDegree(ALGraph* g, int* inDegree);
void topOrder(ALGraph* g);
void getCriticalPath(ALGraph* g, int u, int& minTime);
void criticalPath(ALGraph* g);
~ALGraph() = default;
};
// 用头插法在编号为u, v的顶点间增加一条边
void ALGraph::addEdge(ALGraph* g, int u, int v, int w) {
// 创建一个新的链表结点
ArcNodePtr p = new ArcNode();
// 有向边的狐头
p->adjVertex = v;
// 新结点指向头结点后继
p->nextArc = g->vertexes[u].firstArc;
// 有向边<u,v>的权值
p->weight = w;
// 头结点指向新结点
g->vertexes[u].firstArc = p;
}
// 从文件输入中创建邻接表存储的有向图
void ALGraph::createALGraph(ALGraph* g) {
// 文件输入
ifstream input("test01.txt");
// 输入顶点数和边数
input >> g->vexNum >> g->arcNum;
// 输入每个顶点的值并初始化指针为nullptr
for (int i = 0; i < g->vexNum; ++i) {
//让顶点存储的数据为顶点的编号
g->vertexes[i].data = i + '0';
g->vertexes[i].firstArc = nullptr;
}
// 读入<u, v>的一条带权有向边
for (int i = 0; i < g->arcNum; ++i) {
int u, v, w;
input >> u >> v >> w;
addEdge(g, u, v, w);
}
}
// 求图中每个顶点的入度
void ALGraph::getInDegree(ALGraph* g, int* inDegree) {
// 遍历图
for (int i = 0; i < g->vexNum; ++i)
for (ArcNodePtr p = g->vertexes[i].firstArc; p != nullptr; p = p->nextArc)
// 每条有向边的终点顶点入度加一
inDegree[p->adjVertex]++;
}
// 拓扑排序求early和last
void ALGraph::topOrder(ALGraph* g) {
// 每个结点的入度初始化为0
int inDegree[MAX_VERTEX_NUM] = { 0 };
// 求每个顶点的入度数组inDegree
getInDegree(g, inDegree);
// 初始化两个存储int类型下标的栈,st用于存储入度为0的点,topOrder用于存储拓扑排序的顺序
stack<int> st, topOrder;
// 先将所有入度为0的点存入st中
for (int i = 0; i < g->vexNum; ++i)
if (!inDegree[i]) st.push(i);
// 若栈st中存在入度为0的结点,则继续进行拓扑排序
while (!st.empty()) {
// 从栈顶弹出一个图中的顶点,存入topOrder中
int curVex = st.top();
topOrder.push(curVex);
st.pop();
// 遍历该顶点的所有邻接点
for (ArcNodePtr p = g->vertexes[curVex].firstArc; p != nullptr; p = p->nextArc) {
if (!(--inDegree[p->adjVertex]))
// 如果入度减一后该邻接点的入度为0,则加入栈st中作为下一次排序的起点
st.push(p->adjVertex);
if (early[curVex] + p->weight > early[p->adjVertex])
early[p->adjVertex] = early[curVex] + p->weight;
}
}
//初始化所有事件的最迟开始时间数组last为汇点的最早发生时间
for (int i = 0; i < g->vexNum; i++)
last[i] = early[g->vexNum - 1];
while (!topOrder.empty()) {
// 获取栈顶元素
int curVex = topOrder.top();
topOrder.pop();
// 遍历当前顶点的所有邻接点
for (ArcNodePtr p = g->vertexes[curVex].firstArc; p; p = p->nextArc) {
if (last[p->adjVertex] - p->weight < last[curVex])
last[curVex] = last[p->adjVertex] - p->weight;
}
}
// 输出所有顶点的early值
cout << "early: ";
for (int i = 0; i < g->vexNum; ++i)
cout << early[i] << " ";
// 输出所有顶点的last值
cout << endl << "last: ";
for (int i = 0; i < g->vexNum; ++i)
cout << last[i] << " ";
}
// 求解关键路径
void ALGraph::getCriticalPath(ALGraph* g, int u, int& minTime) {
// 遍历当前顶点u的所有邻接点
for (ArcNodePtr p = g->vertexes[u].firstArc; p != nullptr; p = p->nextArc) {
if (early[u] == last[p->adjVertex] - p->weight) {
minTime += p->weight;
// 将关键活动存入vec中
vec.push_back(u);
vec.push_back(p->adjVertex);
getCriticalPath(g, p->adjVertex, minTime);
// 找到一条关键路径,结束循环
break;
}
}
}
void ALGraph::criticalPath(ALGraph* g) {
cout << endl << "关键路径:";
getCriticalPath(g, 0, minTime);
for (int i = 0; i < vec.size(); i = i + 2) {
cout << "V" <<vec[i] <<"->";
}
cout << "V" << vec[vec.size() - 1];
cout << endl << "工程最短完成时间: " << minTime;
}
int main() {
ALGraph* G = new ALGraph();
G->createALGraph(G); // 创建图的图的邻接表存储
G->topOrder(G); //拓扑排序
G->criticalPath(G); //求关键路径
G->~ALGraph();
return 0;
}
test01.txt文件输入为:
7 8
0 1 6
0 2 4
0 3 5
1 4 1
2 4 1
3 5 2
4 6 7
5 6 4

屏幕输出:

智能推荐
java 无法读取文件_java 读取文件,无法显示文件内容,如何解决? 谢谢。-程序员宅基地
文章浏览阅读1.1k次。从来没见过进行文件读取写入时,在写入中需要随机数的,你读取文件就是从一个地方获取输入流,然后将这个输入流写到别的地方,根本不要随机数。给你一个示例://copyafiletoanotherfilebyusingFileReader/FileWriterimportjava.io.*;publicclassTFileRead{publicstaticvoidmain(S..._java复制文件文件没有内容显示
vue引入原生高德地图_前端引入原生地图-程序员宅基地
文章浏览阅读556次,点赞2次,收藏3次。由于工作上的需要,今天捣鼓了半天高德地图。如果定制化开发需求不太高的话,可以用vue-amap,这个我就不多说了,详细就看官网 https://elemefe.github.io/vue-amap/#/zh-cn/introduction/install然而我们公司需要英文版的高德,我看vue-amap中好像没有这方面的配置,而且还有一些其他的定制化开发需求,然后就只用原生的高德。其实原生的引入也不复杂,但是有几个坑要填一下。1. index.html注意,引入的高德js一定要放在头部而_前端引入原生地图
ViewGroup重写大法 (一)-程序员宅基地
文章浏览阅读104次。本文介绍ViewGroup重写,我们所熟知的LinearLayout,RelativeLayout,FrameLayout等等,所有的容器类都是ViewGroup的子类,ViewGroup又继承View。我们在熟练应用这些现成的系统布局的时候可能有时候就不能满足我们自己的需求了,这是我们就要自己重写一个容器来实现效果。ViewGroup重写可以达到各种效果,下面写一个简单的重写一个Vi..._viewgroup 重写
Stm32学习笔记,3万字超详细_stm32笔记-程序员宅基地
文章浏览阅读1.8w次,点赞279次,收藏1.5k次。本文章主要记录本人在学习stm32过程中的笔记,也插入了不少的例程代码,方便到时候CV。绝大多数内容为本人手写,小部分来自stm32官方的中文参考手册以及网上其他文章;代码部分大多来自江科大和正点原子的例程,注释是我自己添加;配图来自江科大/正点原子/中文参考手册。笔记内容都是平时自己一点点添加,不知不觉都已经这么长了。其实每一个标题其实都可以发一篇,但是这样搞太琐碎了,所以还是就这样吧。_stm32笔记
CTS(13)---CTS 测试之Media相关测试failed 小结(一)_mediacodec框架 cts-程序员宅基地
文章浏览阅读1.8k次。Android o CTS 测试之Media相关测试failed 小结(一)CTSCTS 即兼容性测试套件,CTS 在桌面设备上运行,并直接在连接的设备或模拟器上执行测试用例。CTS 是一套单元测试,旨在集成到工程师构建设备的日常工作流程(例如通过连续构建系统)中。其目的是尽早发现不兼容性,并确保软件在整个开发过程中保持兼容性。CTS 是一个自动化测试工具,其中包括两个主要软件组件:CTS tra..._mediacodec框架 cts
chosen.js插件使用,回显,动态添加选项-程序员宅基地
文章浏览阅读4.5k次。官网:https://harvesthq.github.io/chosen/实例化$(".chosen-select").chosen({disable_search_threshold: 10});赋值var optValue = $(".chosen-select").val();回显1.设置回显的值$(".chosen-select").val(“opt1”);2.触发cho..._chosen.js
随便推点
java中的一些经典算法_java中temsize+=1运算-程序员宅基地
文章浏览阅读360次。转自:落尘曦的博客:http://blog.csdn.net/qq_23994787 原文链接:https://blog.csdn.net/qq_23994787/article/details/77951244#_Toc9101经典算法的Java实现(1)河内塔问题: 42(2)费式数列 43(3)巴斯卡(Pascal)三角形 44(4)蒙地卡罗法求 PI 45(..._java中temsize+=1运算
Linux习题简答题_linux中,第一个普通用户的uid为____。-程序员宅基地
文章浏览阅读3.1k次,点赞6次,收藏27次。第一章Q1 简述Linux系统的应用领域 Linux服务器;嵌入式Linux系统;软件开发平台;桌面应用Q2 简述Linux系统的特点 开放性、多用户、多任务、良好的用户界面、设备独立性、丰富的网络功能、可靠的系统安全、良好的可移植性Q3 简述Linux系统的组成 内核、shell、文件系统、应用程序Q4 简述主流的Linux发行版本 Redhat SUSE Oracle CentOS Ubuntu Debian Mandriva Gentoo Slackware Fe_linux中,第一个普通用户的uid为____。
【路径规划】基于matlab粒子群算法新型概率密度无人机作战路径规划【含Matlab源码 2620期】_已知目标出现概率热图matlab无人机路径规划-程序员宅基地
文章浏览阅读183次。粒子群算法新型概率密度无人机作战路径规划完整的代码,方可运行;可提供运行操作视频!适合小白!_已知目标出现概率热图matlab无人机路径规划
navicat执行.sql文件_navicat执行sql文件-程序员宅基地
文章浏览阅读2w次,点赞5次,收藏19次。1、准备好需要执行的.sql文件.sql文件需要注意:每条语句都需要用;作为结束,否则属于语法错误,执行会报错。我们用下面3条语句生成.sql文件测试一下:select SYSDATE() from dual;select COUNT(100) from dual;select CONCAT_WS(' ','test','import','.sql','files');将它保存为import_demo.sql等待测试。2、navicat中选中数据库右键选择.sql文件进行执行选中目标数据库_navicat执行sql文件
Javaweb框架 思维导图_javaweb框架图-程序员宅基地
文章浏览阅读748次。javaweb知识点_javaweb框架图
adb的升级与版本更新_adb iptabls怎么升级-程序员宅基地
文章浏览阅读1.1w次,点赞3次,收藏16次。adb是没有自动升级的命令的,如果想要更新adb的版本,我们可以在网上找到自己想要的版本进行更新给大家提供几个版本https://pan.baidu.com/s/1yd0dsmWn5CK08MlyuubR7g&shfl=shareset 提取码: 94z81、下载解压后我们可以找到下面几个文件,并复制2、找到adb安装的文件夹下的platform-tools文件夹,我这里是..._adb iptabls怎么升级