CAN——通讯实验_can通讯实验-程序员宅基地
目录
CAN通讯介绍
CAN物理层

汽车一般用闭环总线网络

最大长度为40m指CAN_High和CAN_Low的最大长度都为40m


CAN总线上挂载的设备不受限制。因为CAN总线协议不是像SPI和IIC那样通过设备地址来寻找的,而是通过对报文进行编地址(编码)然后广播出去
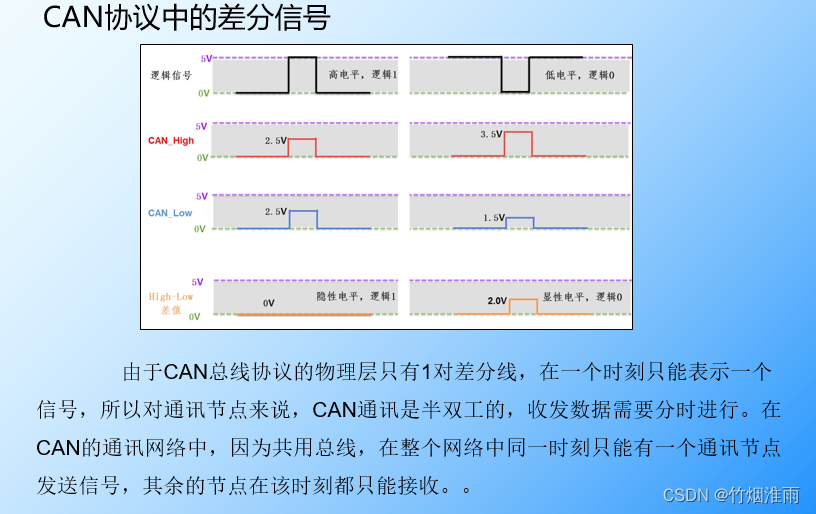
CAN想要实现通信必须有控制器和收发器,而指南者板子上没有收发器所以只能做回环实验,内部将数据从TX直接发送到RX。
CAN收发器负责将TTL电平信号和差分电平信号进行相互转换

差分信号又叫差模信号

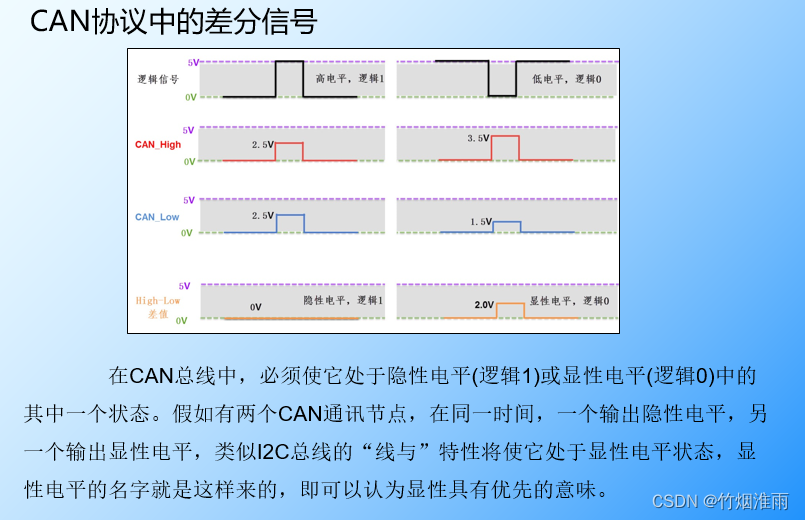
类似于IIC,同一时间CAN总线上只能有有一个设备节点发送信号,通过显性逻辑电平来区分。但与IIC不同,CAN协议不区分主从机。
CAN协议层
通过前面已经了解到为了在汽车和工业环境下使用,物理层使用差分信号来处理,从而保证通讯的正常。同样,协议层也做了大量的工作来确保数据传输正确。相比于串口通讯,要复杂得多。
如果物理层采用差分信号,协议层采用串口通讯的方法,就是485通讯。而CAN总线在协议层还包括了报文、“位同步”(再同步)等操作来确保数据传输稳定。
CAN的协议层规定了通讯逻辑。
1. CAN的波特率及位同步
由于CAN属于异步通讯,没有时钟信号线,连接在同一个总线网络中的各个节点会像串口异步通讯那样,节点间使用约定好的波特率进行通讯,特别地,CAN还会使用“位同步”的方式来抗干扰、吸收误差,实现对总线电平信号进行正确的采样,确保通讯正常。
位时序分解
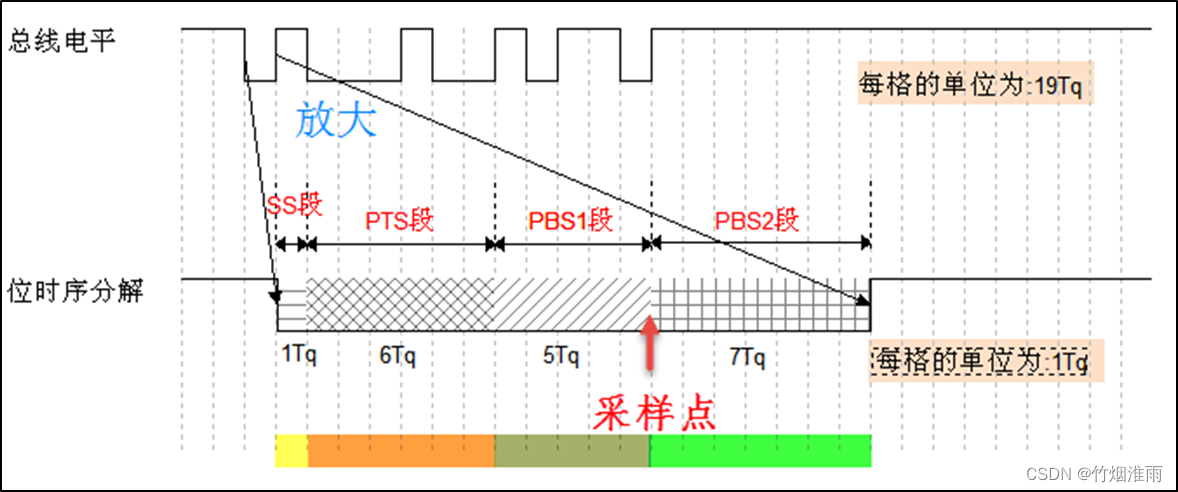
为了实现位同步,CAN协议把每一个数据位的时序分解成SS段、PTS段、PBS1段、PBS2段,这四段的长度加起来即为一个CAN数据位的长度。分解后最小的时间单位是Tq,而一个完整的位由8~25个Tq组成。规定好了在PBS1和PBS2的交界处来进行电平信号的采样(用CAN high-CAN low来判断是逻辑0还是逻辑1)
(其中总线电平为CAN的逻辑电平信号)

图中表示的CAN通讯信号每一个数据位的长度为19Tq,其中SS段占1Tq,PTS段占6Tq,PBS1段占5Tq,PBS2段占7Tq。信号的采样点位于PBS1段与PBS2段之间,通过控制各段的长度,可以对采样点的位置进行偏移,以便准确地采样。
- SS段(SYNC SEG)
SS译为同步段,若通讯节点检测到总线上信号的跳变沿被包含在SS段的范围之内,则表示节点与总线的时序是同步的,当节点与总线同步时,采样点采集到的总线电平即可被确定为该位的电平。SS段的大小固定为1Tq。
为什么电平跳变可能不处于SS段呢?
比如现在有两个节点(如两块STM32板子),由于两个板子是独立的,由于晶振可能会不准确,节点A的一个PBS可能可能会与节点B的一个PBS时间不一样。节点2接收节点1发送的数据,节点2本来认为应该在SS段接收到节点1的数据,结果却过了两个Tq才检测到。这个时候节点2通过内部时钟算出来的波特率跟节点1传过来数据的波特率可能是由于总线延迟或者本身两个板子之间晶振不协调而导致的误差。这样节点就会知道接收的数据不同步了。

- PTS段(PROP SEG)
PTS译为传播时间段,这个时间段是用于补偿网络的物理延时时间。是总线上输入比较器延时和输出驱动器延时总和的两倍。PTS段的大小可以为1~8Tq。(重要性不大,直接配置就好)
- PBS1段(PHASE SEG1),
PBS1译为相位缓冲段,主要用来补偿边沿阶段的误差,它的时间长度在重新同步的时候可以加长。PBS1段的初始大小可以为1~8Tq。
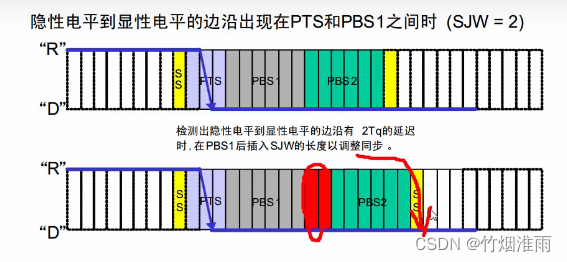
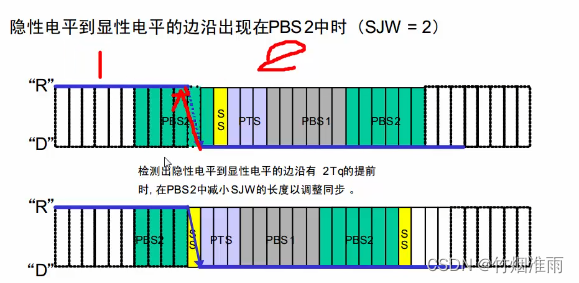
(SJW表示可以插入补偿的长度)
由于第一次检测到数据产生了误差,所以通过“再同步”的方式,再PBS1后插入SJW的长度进行补偿,从而预计确保下一次接收到的数据的时间点落在SS段里。
- PBS2段(PHASE SEG2)
PBS2这是另一个相位缓冲段,也是用来补偿边沿阶段误差的,它的时间长度在重新同步时可以缩短。PBS2段的初始大小可以为2~8Tq。
图中一共有两个数据位,我们本来预计数据应该再第二个数据位的SS段出现,但结果第一个数据位还没有结束,数据就出现了。如果不做处理,就会导致之后的偏移误差越来越大。因此我们在第一个数据位减小SJW的长度,使第二个数据位的SS段立刻开始,从而预计确保下一次接收数据正确。
通讯的波特率
总线上的各个通讯节点只要约定好1个Tq的时间长度以及每一个数据位占据多少个Tq,就可以确定CAN通讯的波特率。
例如,假设上图中的1Tq=1us,而每个数据位由19个Tq组成,则传输一位数据需要时间T1bit =19us,从而每秒可以传输的数据位个数为:
1x106/19 = 52631.6 (bps)
这个每秒可传输的数据位的个数即为通讯中的波特率。
2. CAN的报文种类及结构
当使用CAN协议进行通讯时,需要对数据、操作命令(如读/写)以及同步信号进行打包,打包后的这些内容称为报文。
报文的种类
在原始数据段的前面加上传输起始标签、片选(识别)标签和控制标签,在数据的尾段加上CRC校验标签、应答标签和传输结束标签,把这些内容按特定的格式打包好,就可以用一个通道表达各种信号,各种各样的标签就如同SPI中各种通道上的信号,起到了协同传输的作用。当整个数据包被传输到其它设备时,只要这些设备按格式去解读,就能还原出原始数据,这样的报文就被称为CAN的“数据帧”。
为了更有效地控制通讯,CAN一共规定了5种类型的帧。
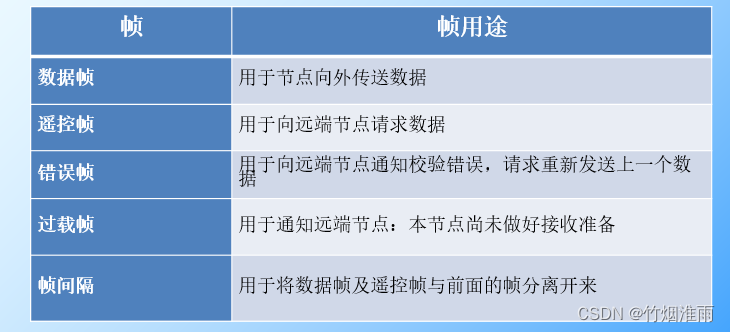
数据帧的结构
数据帧的结构图:

数据帧以一个显性位(逻辑0)开始,以7个连续的隐性位(逻辑1)结束,在它们之间,分别有仲裁段、控制段、数据段、CRC段和ACK段。(数据帧的最小单位是数据位,数据位的最小单位是Tq)
帧起始
SOF段(Start Of Frame),译为帧起始,帧起始信号只有一个数据位,是一个显性电平,它用于通知各个节点将有数据传输,其它节点通过帧起始信号的电平跳变沿来进行硬同步。
仲裁段
当同时有两个报文被发送时,总线会根据仲裁段的内容决定哪个数据包能被传输,这也是它名称的由来。
仲裁段的内容主要为本数据帧的ID信息(标识符),数据帧具有标准格式和扩展格式两种,区别就在于ID信息的长度,标准格式的ID为11位,扩展格式的ID为29位,它在标准ID的基础上多出18位。
(由于在CAN协议里面,每个节点是没有地址的,也没有主机从机之分,所以数据都是广播出去的,而数据能否被接收到是由信息的重要性决定的。比如发生车祸的时候,汽车想要执行防抱死装置,这是车载系统就会通过CAN发送ABS控制指令给车轮或者刹车器,由于ABS是优先级非常高的报文,此时空调等次要优先级的命令报文就暂停发送)
因此在CAN协议中,ID起着重要的作用,它决定着数据帧发送的优先级,也决定着其它节点是否会接收这个数据帧。CAN协议不对挂载在它之上的节点分配优先级和地址,对总线的占有权是由信息的重要性决定的,即对于重要的信息,可给它打包上一个优先级高的ID,使它能够及时地发送出去。
也正因为它这样的优先级分配原则,使得CAN的扩展性大大加强,在总线上增加或减少节点并不影响其它设备。
分析如下图:
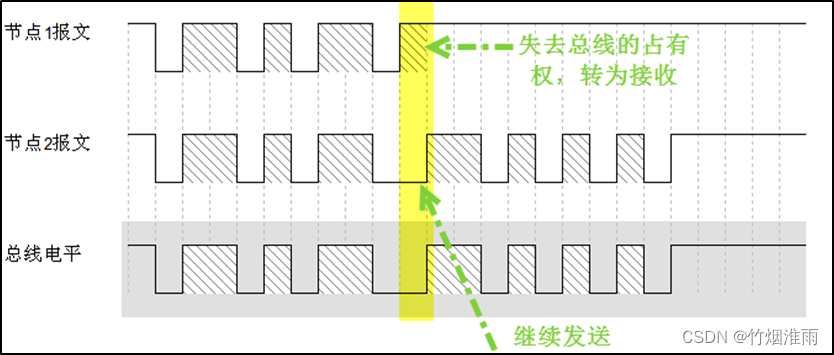
报文的优先级,是通过对ID的仲裁来确定的。根据前面对物理层的分析我们知道如果总线上同时出现显性电平和隐性电平,总线的状态会被置为显性电平,CAN正是利用这个特性进行仲裁。
若两个节点同时竞争CAN总线的占有权,当它们发送报文时,若首先出现隐性电平,则会失去对总线的占有权,进入接收状态。在开始阶段,两个设备发送的电平一样,所以它们一直继续发送数据。到了图中箭头所指的时序处,节点单元1发送的为隐性电平(高电平),而此时节点单元2发送的为显性电平(低电平),由于总线的“线与”特性使它表达出显示电平,因此单元2竞争总线成功,这个报文得以被继续发送出去。
仲裁段的高低电平(0、1)刚好就组成了报文的ID号,ID号的数字越小,就表示该报文的优先级越高。
仲裁段补充
仲裁段ID的优先级也影响着接收设备对报文的反应。因为在CAN总线上数据是以广播的形式发送的,所有连接在CAN总线的节点都会收到所有其它节点发出的有效数据,因而CAN控制器大多具有根据ID过滤报文的功能,它可以控制自己只接收某些ID的报文。
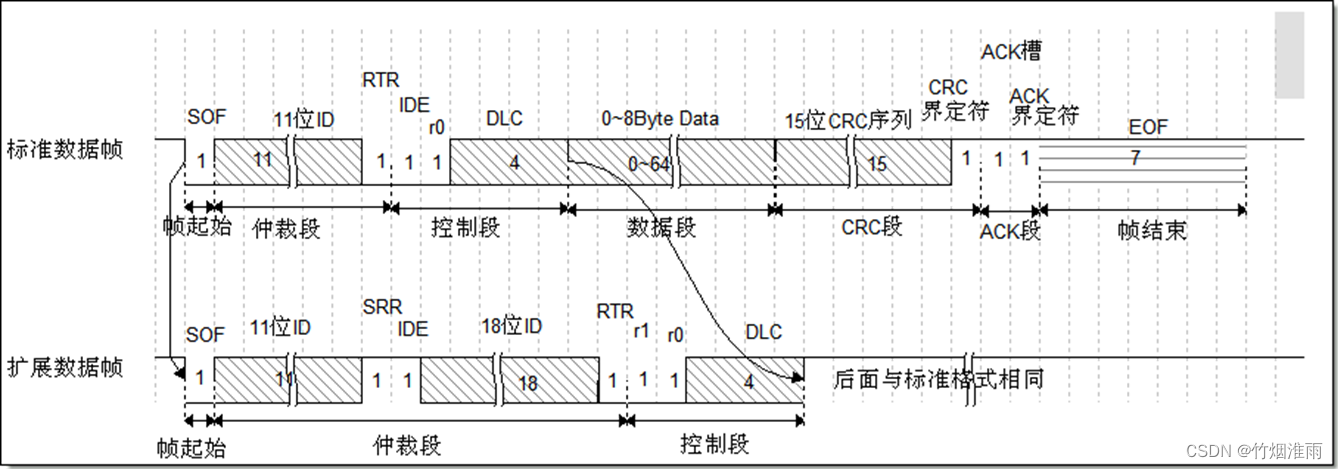
- RTR位(Remote Transmission Request Bit),译作远程传输请求位,属于仲裁段的最后一个数据位,它是用于区分数据帧和遥控帧的,当它为显性电平时表示数据帧,隐性电平时表示遥控帧。注意数据帧比遥控帧优先级高。
比如我们规定温度传感器的ID号是5,比如某个节点它有温度传感器的数据,那么它对总线广播这个数据的时候,它就会设置RTR位为0,表示发送数据帧;如果该节点要发送遥控帧请求温度信息,它同样会设置ID号为5,然后把RTR位设置位1,那么遥控帧发送出去之后,另一端具有温度信息的节点接收到这个帧之后,就会把温度数据传送过去。
控制段
- IDE位(Identifier Extension Bit),译作标识符扩展位,它是用于区分标准格式与扩展格式,当它为显性电平时表示标准格式,隐性电平时表示扩展格式。
- SRR位(Substitute Remote Request Bit),只存在于扩展格式,它用于替代标准格式中的RTR位。由于扩展帧中的SRR位为隐性位,RTR在数据帧为显性位,所以在两个ID相同的标准格式报文与扩展格式报文中,标准格式的优先级较高。
在控制段中的r1和r0为保留位,默认设置为显性位。它最主要的是DLC段(Data Length Code),译为数据长度码,它由4个数据位组成,用于表示本报文中的数据段含有多少个字节,虽然有四个数据位,但DLC段表示的数字只能为0~8。
数据段
数据段为数据帧的核心内容,它是节点要发送的原始信息,由0~8个字节组成,MSB先行。
CRC段
为了保证报文的正确传输,CAN的报文包含了一段15位的CRC校验码,一旦接收节点算出的CRC码跟接收到的CRC码不同,则它会向发送节点反馈出错信息,利用错误帧请求它重新发送。CRC部分的计算一般由CAN控制器硬件完成,出错时的处理则由软件控制最大重发数。
在CRC校验码之后,有一个CRC界定符,它为隐性位,主要作用是把CRC校验码与后面的ACK段间隔起来。
ACK段
ACK段包括一个ACK槽位,和ACK界定符位。类似I2C总线,在ACK槽位中,发送节点发送的是隐性位,而接收节点则在这一位中发送显性位以示应答。在ACK槽和帧结束之间由ACK界定符间隔开。
帧结束
EOF段(End Of Frame),译为帧结束,帧结束段由发送节点发送的7个隐性位表示结束。
全部报文
全部报文如下图所示:
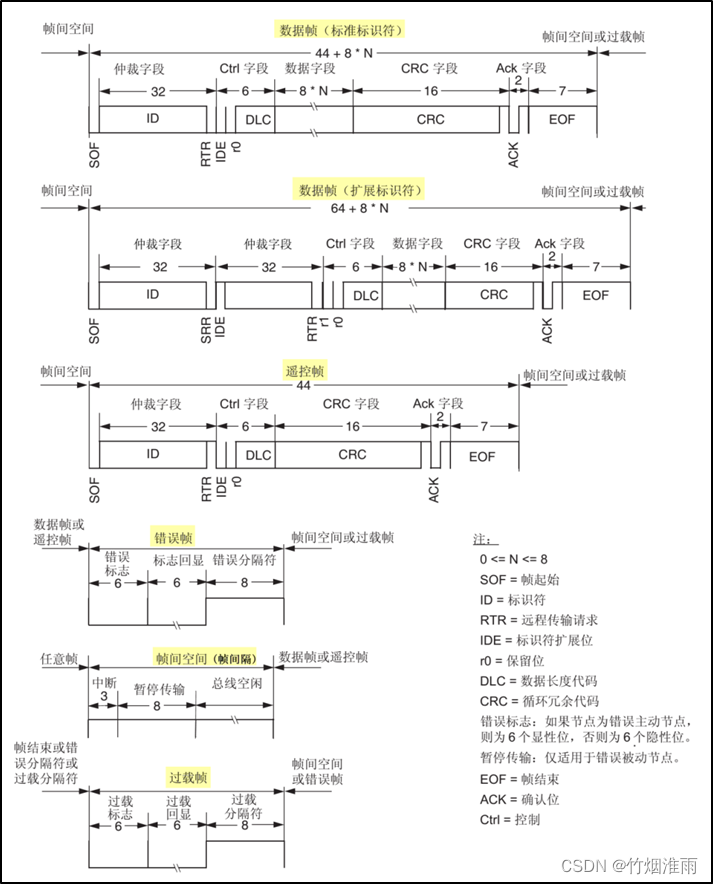
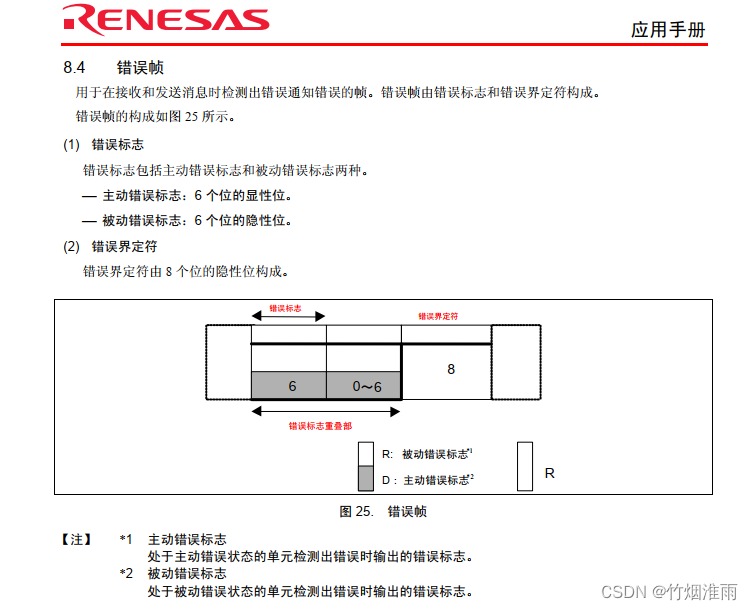
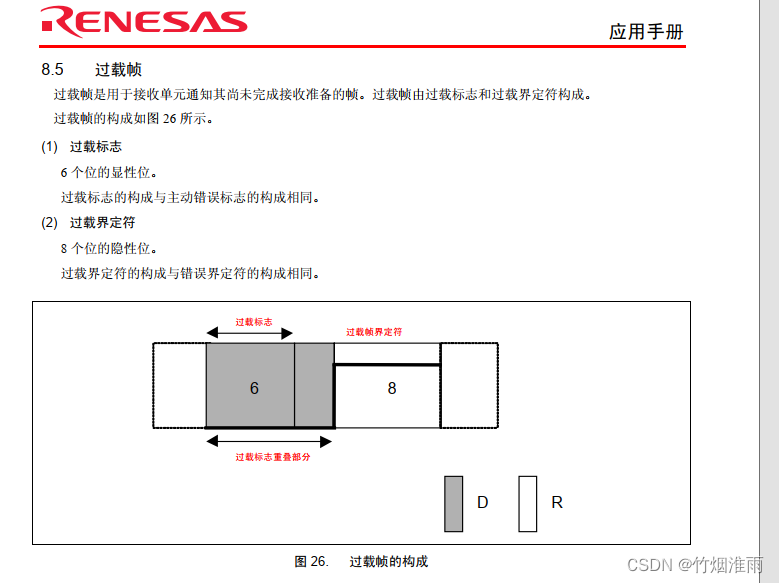
其中错误帧和过载帧是一样的,其中错误帧的错误标准:如果六个数据位都是0,表示主动的错误,如发送错误或过载;都是1的话,就表示被动的错误,比如校验错误
帧间隔具体如下:
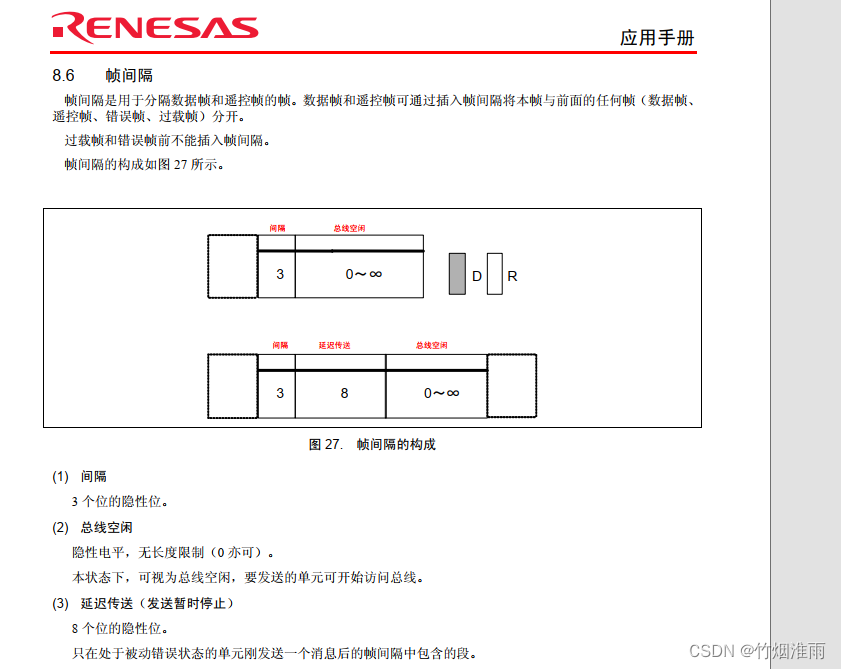
详细可见《CAN总线入门手册》
智能推荐
转贴 解决sd卡的读写问题_hc32f460 sd 卡 micro sd卡-程序员宅基地
文章浏览阅读1.6k次。最近sd卡读写出了问题,参考一篇网志解决。http://sns.linuxpk.com/space-1717-do-blog-id-15748.html 在embedded linux下插上一个U盘,在/dev/scsi/ 目录下,出现了4个part 。把该U盘插在pc机,在windows下_hc32f460 sd 卡 micro sd卡
qsort函数(c语言库函数)_qsqrt位于什么库中-程序员宅基地
文章浏览阅读643次,点赞19次,收藏9次。qsort函数的基本概念及代码示例_qsqrt位于什么库中
flink 1.13.1配置报错的解决过程_main error could not create plugin of type class o-程序员宅基地
文章浏览阅读4.3k次。部署flink提交客户端的时间报错如下:提示/tmp下无权限flink@dbos-bigdata-flink004 ~]$ flink run -m yarn-cluster -yjm 1024 -ytm 4096 /opt/flink/examples/batch/WordCount.jarSLF4J: Class path contains multiple SLF4J bindings.SLF4J: Found binding in [jar:file:/opt/flink-1.13.1/l._main error could not create plugin of type class org.apache.logging.log4j.co
大数据概况及Hadoop生态系统_hadoop系统固有功能分析-程序员宅基地
文章浏览阅读308次。一、初识大数据了解大数据是什么。了解大数据的特性。了解大数据带给企业哪些方面的挑战。1.大数据的基本概念大数据(big data),指无法在一定时间范围内用常规软件工具进行捕捉、管理和处理的数据集合,是需要新处理模式才能具有更强的决策力、洞察发现力和流程优化能力的海量、高增长率和多样化的信息资产。2.大数据的特性(1)4V特征:a. Volume(大数据量):90% 的数据是过去两年产生b.Velocity(速度快):数据增长速度快,时效性高c.Variety(多样化):数据种类和来源多_hadoop系统固有功能分析
nginx正向代理的配置及实现-程序员宅基地
文章浏览阅读1.5k次。Nginx 正向代理正向代理:如果把局域网外的Internet想象成一个巨大的资源库,则局域网中的客户端要访问Internet,则需要通过代理服务器来访问,这种代理服务就称为正向代理。目前现状:只有1个机器能上网(web),其他机器不能方法:能上网的做一个代理web服务器中转,其他机器连接它即可。采用nginx1.到nginx的官网中(http://nginx..._nginx 正向代理再客户端配置嘛
NFC技术演进_nfc的演进-程序员宅基地
文章浏览阅读289次。RF演进protocol 演进_nfc的演进
随便推点
由繁化简 Q-Automation助力自动化测试管理-程序员宅基地
文章浏览阅读383次,点赞8次,收藏7次。Q-Automation是基于ATX的自动化测试管理软件,用于测试电子控制单元(ECU)。该软件支持诊断协议层测试和诊断功能测试,且只需填写Excel表格,即可实现半自动化测试需求,从而缩短用户的测试周期。此外,使用ODX/OTX标准化工具,可在支持多种测试硬件的同时,减少测试软件的兼容性问题,还便于与其它工具共享数据。
【试水CAS-4.0.3】第04节_CAS服务端通过数据库认证用户_cas如何数据库管理 serviceid-程序员宅基地
文章浏览阅读5.5k次。完整版见https://jadyer.github.io/2015/07/18/sso-cas-login-db/_cas如何数据库管理 serviceid
C# 调用RESTFul接口_c#调用restful接口-程序员宅基地
文章浏览阅读3.2k次。c# Restful_c#调用restful接口
HOG特征——行人识别_hog特征识别行人 peopledetector=vision.peopledetector; i=-程序员宅基地
文章浏览阅读1.8k次,点赞4次,收藏24次。HOG特征简介HOG 全称为 Histogram of Oriented Gradients ,即方向梯度的直方图。HOG 是由 Navneet Dalal & Bill Triggs 在 CVPR 2005发表的论文中提出来的,目的是为了更好的解决行人检测的问题。先来把这几个字拆开介绍,首先,梯度的概念和计算梯度的方法已经在前一篇文章中介绍了,方向梯度就是说梯度的方向我们也要利用上,..._hog特征识别行人 peopledetector=vision.peopledetector; i=imread(
Spring Cloud 微服务的安全保护_springboot微服务安全-程序员宅基地
文章浏览阅读2.8k次,点赞2次,收藏9次。上一篇文章中介绍了如何使用Spring Cloud搭建微服务,在本文中讲讲如何对微服务进行安全保护。在Spring Cloud中对应用进行安全保护通常使用Spring Security,这种方式集成起来非常简单而且很容易扩展现有的应用场景。在分布式环境中Spring Security使用Spring Session和Redis来共享会话。共享会话可以将在微服务网关中登录的用户验证信息传递到系统..._springboot微服务安全
生物信息学中两种常用的文本文件_.fa.gz-程序员宅基地
文章浏览阅读961次。通过自学《碱基矿工》[http://mp.weixin.qq.com/mp/homepage?__biz=MzAxOTUxOTM0Nw==&hid=1&sn=d945cf61bd86e85724e146df42af5bcc&scene=18#wechat_redirect]下面分别介绍这两种格式FASTAFASTA常作为存储有顺序的序列数据的文件后缀,包括我们常用的..._.fa.gz