ROS机器人虚拟仿真挑战赛本地电脑环境配置测试-程序员宅基地
技术标签: 机器人
预备基础
此案例需要完成:
ROS机器人虚拟仿真挑战赛本地电脑环境配置记录-程序员宅基地
ROS机器人虚拟仿真挑战赛本地电脑环境配置个人问题汇总-程序员宅基地
命令测试
在不同的终端窗口分别输入:
标签1:
roslaunch tianracer_gazebo demo_tianracer_teb_nav.launch标签2:
rosrun tianracer_gazebo judge_system_node.py如果小车没有移动:


rviz中没有路径规划。
需要查找相应文件修改路径的位置。
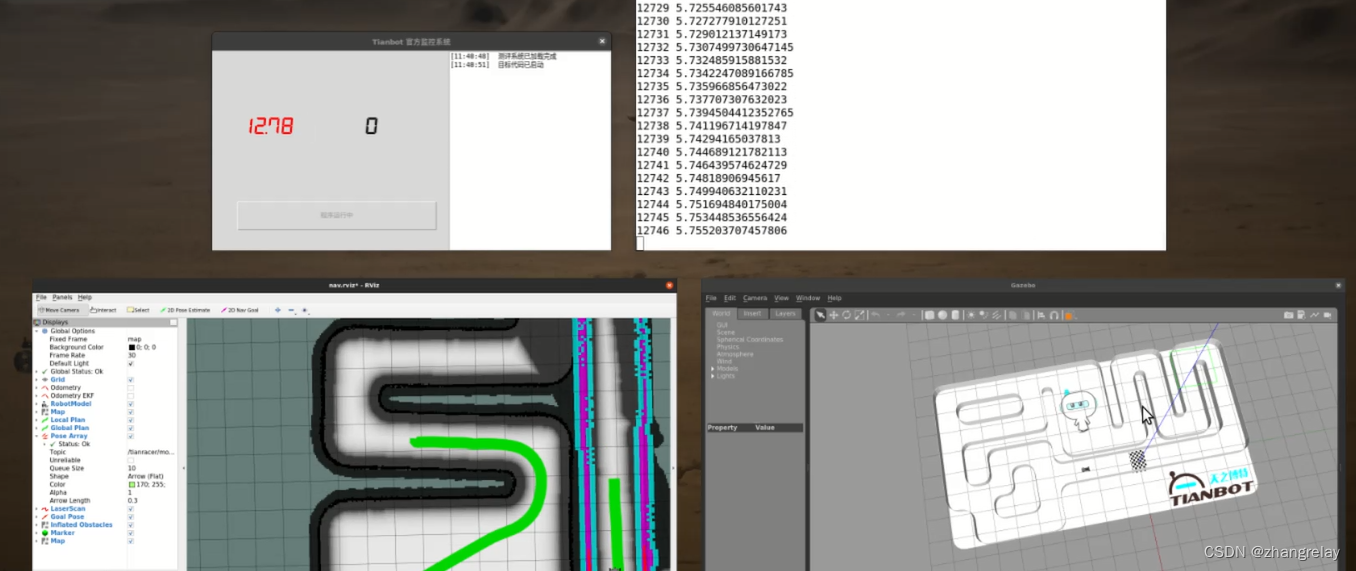
能动起来的rviz和gazebo如下所示:


路径点相关:
阿克曼模型也可以采用类似模式设计控制器。
录屏:
ROS机器人虚拟仿真挑战赛本地电脑环境配置测试
轨迹路径问题
本校《移动机器人设计与实践》和《ROS机器人程序设计》均采用课+赛+证结合模式。
参考:
在f1tenth仿真中如何实现更快速的跑圈-曲线分析篇-程序员宅基地
证书
完全自愿参与,无任何强制。
详细总结如下:
一、预备基础
在进行ROS机器人虚拟仿真挑战赛前,需要完成本地电脑的环境配置。这通常包括安装ROS系统、配置ROS环境变量、安装必要的ROS包以及设置工作空间等。参考“ROS机器人虚拟仿真挑战赛本地电脑环境配置记录”和“个人问题汇总”两篇博客,可以帮助我们避免一些常见的配置错误,并提前解决可能出现的问题。
二、命令测试
在配置好环境后,我们需要在不同的终端窗口输入命令来测试ROS系统的运行情况。
- 标签1命令:
roslaunch tianracer_gazebo demo_tianracer_teb_nav.launch
这个命令用于启动Tianracer在Gazebo中的仿真,并使用TEB局部规划器进行导航。如果小车没有移动,那么我们需要检查Gazebo和RViz的界面,以及ROS的日志输出,看是否有错误信息。 - 标签2命令:
rosrun tianracer_gazebo judge_system_node.py
这个命令用于运行Tianracer的评分系统节点。如果小车没有移动,评分系统可能无法正常工作。
三、路径规划问题
如果在RViz中没有看到路径规划,那么可能是因为路径规划器没有正确配置或者没有接收到正确的传感器数据。我们需要检查路径规划相关的配置文件,确保路径规划器的参数设置正确,并且传感器数据能够正确传递给路径规划器。
四、轨迹路径问题
差动驱动机器人的轨迹设计是机器人导航的关键部分。阿克曼模型是一种常用的轨迹设计模型,适用于差动驱动机器人。我们可以参考相关博客和教程,学习如何使用阿克曼模型设计机器人的轨迹,并在仿真环境中进行测试。
五、课程与证书
《移动机器人设计与实践》和《ROS机器人程序设计》这两门课程采用课+赛+证结合模式,旨在通过实践和学习,提升学生的机器人设计和编程能力。参加ROS机器人虚拟仿真挑战赛并获得证书,是对自己学习成果的一种肯定,也是对未来求职或深造的有力支持。虽然证书是完全自愿参与的,但获得证书可以作为一种能力的证明,提升自己在相关领域的竞争力。
总的来说,ROS机器人虚拟仿真挑战赛不仅是一个学习和实践的平台,也是一个挑战自我、提升能力的机会。通过参与比赛,我们可以深入了解ROS系统的运作机制,掌握机器人设计和编程的技巧,为未来的职业发展打下坚实的基础。
进一步扩展“ROS机器人虚拟仿真挑战赛”的详细总结如下:
一、预备基础
在进行ROS机器人虚拟仿真挑战赛前,完成本地电脑的环境配置是不可或缺的第一步。这涉及到对ROS系统的深入理解和一系列复杂的配置步骤。
首先,需要确保已经安装了与挑战赛要求相匹配的ROS发行版。不同的发行版在功能和API上可能有所差异,因此选择正确的发行版至关重要。安装完成后,还需要配置ROS的环境变量,以确保系统能够正确识别ROS的相关路径和命令。
接下来,需要安装必要的ROS包。这些包可能包括用于机器人仿真的Gazebo、用于可视化的RViz、用于路径规划的TEB局部规划器等。安装这些包时,需要注意包的版本和依赖关系,以确保它们能够正常工作。
最后,需要设置ROS的工作空间。工作空间是ROS中用于组织代码和资源的重要概念,它包括了源代码、构建结果和安装目录等。正确设置工作空间可以方便我们对代码进行管理和维护。
在配置过程中,可能会遇到一些个人问题。参考相关的博客和教程,可以帮助我们快速定位并解决问题。同时,也可以加入ROS的社区和论坛,与其他ROS开发者交流经验和技巧。
二、命令测试
完成环境配置后,我们需要通过命令测试来验证ROS系统的运行情况。
首先,通过roslaunch命令启动Tianracer在Gazebo中的仿真。这个命令会加载Tianracer的仿真配置文件,并在Gazebo中创建一个虚拟的机器人环境。如果小车没有移动,我们需要检查Gazebo界面中的机器人模型是否加载成功,以及是否有任何错误或警告信息。
然后,通过rosrun命令运行Tianracer的评分系统节点。这个节点会接收来自仿真环境的数据,并根据一定的规则对机器人的表现进行评分。如果评分系统没有正常工作,我们需要检查节点的日志输出,看是否有任何异常或错误信息。
在测试过程中,我们还可以使用RViz来可视化机器人的状态和轨迹。通过RViz,我们可以直观地看到机器人的位置、朝向以及规划出的路径等信息。如果RViz中没有显示路径规划,我们需要检查路径规划器的配置和传感器数据的传递是否正确。
三、路径规划问题
路径规划是机器人导航的关键部分,它涉及到从起点到终点的最优路径选择。在ROS中,有多种路径规划器可供选择,如全局路径规划器和局部路径规划器等。
对于Tianracer的仿真环境,我们使用了TEB局部规划器进行导航。TEB规划器是一种基于时间弹性的局部路径规划器,它能够在考虑机器人动力学约束的同时优化路径的平滑性和时间效率。然而,如果RViz中没有显示路径规划,那么可能是TEB规划器的配置参数不正确或者传感器数据没有正确传递给规划器。
为了解决这个问题,我们需要检查TEB规划器的配置文件,确保其中的参数设置符合Tianracer机器人的特性和要求。特别是与机器人动力学约束、障碍物避障以及路径平滑性相关的参数,需要进行仔细的调整和测试。
此外,我们还需要确保传感器数据能够正确传递给TEB规划器。这涉及到传感器数据的采集、处理和发布等步骤。我们需要检查传感器的驱动程序和ROS节点是否正常工作,以及传感器数据是否与规划器所需的格式和频率相匹配。
四、轨迹路径问题
差动驱动机器人的轨迹设计是实现自主导航的关键环节。阿克曼模型是一种常用的轨迹设计模型,它适用于差动驱动机器人的运动特性。
在阿克曼模型中,机器人的运动被描述为一系列圆弧和直线的组合。通过合理设计这些圆弧和直线的参数,我们可以实现机器人的平滑运动和精确定位。在ROS中,我们可以使用阿克曼模型来设计机器人的轨迹,并通过控制机器人的线速度和角速度来实现轨迹的跟踪。
然而,轨迹设计并不是一件简单的事情。它需要考虑机器人的动力学约束、环境障碍物以及任务要求等多个因素。为了获得更好的轨迹效果,我们可以使用优化算法对轨迹进行优化,以找到最优的路径和速度组合。
此外,我们还可以通过仿真环境对轨迹进行测试和验证。在Tianracer的仿真环境中,我们可以使用Gazebo和RViz来观察机器人的运动轨迹和状态,并根据测试结果对轨迹进行调整和优化。
五、课程与证书
参与《移动机器人设计与实践》和《ROS机器人程序设计》这两门课程,不仅可以帮助我们深入学习ROS系统和机器人技术,还可以提升我们的实践能力和解决问题的能力。通过课程中的理论学习和实践操作,我们可以掌握ROS的基本概念和工具,了解机器人的感知、决策和控制等方面的知识。
同时,参加ROS机器人虚拟仿真挑战赛并获得证书,是对我们学习成果的一种肯定和认可。证书可以作为我们求职或深造的加分项,提升我们在机器人领域的竞争力。虽然证书是自愿参与的,但获得证书可以激励我们更加努力地学习和实践,提升自己的技能水平。
总之,ROS机器人虚拟仿真挑战赛是一个充满挑战和机遇的平台。通过参与比赛和学习相关
课程,我们可以深入了解ROS系统的运作机制,掌握机器人设计和编程的技巧,为未来的职业发展打下坚实的基础。
六、竞赛经验与学习心得
参与ROS机器人虚拟仿真挑战赛,不仅仅是一个技术层面的挑战,更是一个全方位的学习与成长过程。
在竞赛过程中,我们可能会遇到各种各样的问题和挑战,比如机器人的路径规划失败、传感器数据异常、控制算法不稳定等。这些问题往往需要我们综合运用所学的ROS知识、机器人技术以及编程技能来分析和解决。在解决问题的过程中,我们会不断地尝试、调试和优化,从而逐渐掌握解决问题的方法和技巧。
此外,参与挑战赛还需要我们具备团队合作和沟通的能力。在团队中,每个人都有自己的专长和角色,我们需要相互协作、互相支持,共同完成任务。通过团队合作,我们可以学习到不同人的思维方式和解决问题的方法,提升自己的综合素质。
除了技术和团队方面的收获,参与挑战赛还能让我们更加深入地了解机器人领域的前沿技术和应用。通过与来自不同学校和行业的选手交流,我们可以了解到各种新的想法和解决方案,从而拓宽自己的视野和思路。
总的来说,参与ROS机器人虚拟仿真挑战赛是一次难得的学习和成长机会。通过挑战和锻炼,我们可以不断提升自己的技能水平和综合素质,为未来的职业发展做好充分的准备。
七、未来展望
随着机器人技术的不断发展和普及,ROS作为机器人领域的开源框架,其重要性和影响力也在不断提升。未来,ROS将在更多领域得到应用,包括工业自动化、智能家居、医疗服务等。
对于个人而言,掌握ROS技能和机器人技术将是我们未来职业发展的重要方向之一。通过不断学习和实践,我们可以将ROS应用于实际项目中,为企业和社会创造价值。同时,我们也可以利用ROS平台开展创新研究和探索,为机器人领域的发展做出贡献。
总之,ROS机器人虚拟仿真挑战赛只是我们学习和探索机器人技术的一个起点。未来,我们将继续深入学习和实践,不断提升自己的技能水平和综合素质,为机器人领域的发展贡献自己的力量。
智能推荐
hdu 1229 还是A+B(水)-程序员宅基地
文章浏览阅读122次。还是A+BTime Limit: 2000/1000 MS (Java/Others)Memory Limit: 65536/32768 K (Java/Others)Total Submission(s): 24568Accepted Submission(s): 11729Problem Description读入两个小于10000的正整数A和B,计算A+B。...
http客户端Feign——日志配置_feign 日志设置-程序员宅基地
文章浏览阅读419次。HEADERS:在BASIC的基础上,额外记录了请求和响应的头信息。FULL:记录所有请求和响应的明细,包括头信息、请求体、元数据。BASIC:仅记录请求的方法,URL以及响应状态码和执行时间。NONE:不记录任何日志信息,这是默认值。配置Feign日志有两种方式;方式二:java代码实现。注解中声明则代表某服务。方式一:配置文件方式。_feign 日志设置
[转载]将容器管理的持久性 Bean 用于面向服务的体系结构-程序员宅基地
文章浏览阅读155次。将容器管理的持久性 Bean 用于面向服务的体系结构本文将介绍如何使用 IBM WebSphere Process Server 对容器管理的持久性 (CMP) Bean的连接和持久性逻辑加以控制,使其可以存储在非关系数据库..._javax.ejb.objectnotfoundexception: no such entity!
基础java练习题(递归)_java 递归例题-程序员宅基地
文章浏览阅读1.5k次。基础java练习题一、递归实现跳台阶从第一级跳到第n级,有多少种跳法一次可跳一级,也可跳两级。还能跳三级import java.math.BigDecimal;import java.util.Scanner;public class Main{ public static void main(String[]args){ Scanner reader=new Scanner(System.in); while(reader.hasNext()){ _java 递归例题
面向对象程序设计(荣誉)实验一 String_对存储在string数组内的所有以字符‘a’开始并以字符‘e’结尾的单词做加密处理。-程序员宅基地
文章浏览阅读1.5k次,点赞6次,收藏6次。目录1.串应用- 计算一个串的最长的真前后缀题目描述输入输出样例输入样例输出题解2.字符串替换(string)题目描述输入输出样例输入样例输出题解3.可重叠子串 (Ver. I)题目描述输入输出样例输入样例输出题解4.字符串操作(string)题目描述输入输出样例输入样例输出题解1.串应用- 计算一个串的最长的真前后缀题目描述给定一个串,如ABCDAB,则ABCDAB的真前缀有:{ A, AB,ABC, ABCD, ABCDA }ABCDAB的真后缀有:{ B, AB,DAB, CDAB, BCDAB_对存储在string数组内的所有以字符‘a’开始并以字符‘e’结尾的单词做加密处理。
算法设计与问题求解/西安交通大学本科课程MOOC/C_算法设计与问题求解西安交通大学-程序员宅基地
文章浏览阅读68次。西安交通大学/算法设计与问题求解/树与二叉树/MOOC_算法设计与问题求解西安交通大学
随便推点
[Vue warn]: Computed property “totalPrice“ was assigned to but it has no setter._computed property "totalprice" was assigned to but-程序员宅基地
文章浏览阅读1.6k次。问题:在Vue项目中出现如下错误提示:[Vue warn]: Computed property "totalPrice" was assigned to but it has no setter. (found in <Anonymous>)代码:<input v-model="totalPrice"/>原因:v-model命令,因Vue 的双向数据绑定原理 , 会自动操作 totalPrice, 对其进行set 操作而 totalPrice 作为计..._computed property "totalprice" was assigned to but it has no setter.
basic1003-我要通过!13行搞定:也许是全网最奇葩解法_basic 1003 case 1-程序员宅基地
文章浏览阅读60次。十分暴力而简洁的解决方式:读取P和T的位置并自动生成唯一正确答案,将题给测点与之对比,不一样就给我爬!_basic 1003 case 1
服务器浏览war文件,详解将Web项目War包部署到Tomcat服务器基本步骤-程序员宅基地
文章浏览阅读422次。原标题:详解将Web项目War包部署到Tomcat服务器基本步骤详解将Web项目War包部署到Tomcat服务器基本步骤1 War包War包一般是在进行Web开发时,通常是一个网站Project下的所有源码的集合,里面包含前台HTML/CSS/JS的代码,也包含Java的代码。当开发人员在自己的开发机器上调试所有代码并通过后,为了交给测试人员测试和未来进行产品发布,都需要将开发人员的源码打包成Wa..._/opt/bosssoft/war/medical-web.war/web-inf/web.xml of module medical-web.war.
python组成三位无重复数字_python组合无重复三位数的实例-程序员宅基地
文章浏览阅读3k次,点赞3次,收藏13次。# -*- coding: utf-8 -*-# 简述:这里有四个数字,分别是:1、2、3、4#提问:能组成多少个互不相同且无重复数字的三位数?各是多少?def f(n):list=[]count=0for i in range(1,n+1):for j in range(1, n+1):for k in range(1, n+1):if i!=j and j!=k and i!=k:list.a..._python求从0到9任意组合成三位数数字不能重复并输出
ElementUl中的el-table怎样吧0和1改变为男和女_elementui table 性别-程序员宅基地
文章浏览阅读1k次,点赞3次,收藏2次。<el-table-column prop="studentSex" label="性别" :formatter="sex"></el-table-column>然后就在vue的methods中写方法就OK了methods: { sex(row,index){ if(row.studentSex == 1){ return '男'; }else{ return '女'; }..._elementui table 性别
java文件操作之移动文件到指定的目录_java中怎么将pro.txt移动到design_mode_code根目录下-程序员宅基地
文章浏览阅读1.1k次。java文件操作之移动文件到指定的目录_java中怎么将pro.txt移动到design_mode_code根目录下