在一个项目中,笔者接触过这样一个通讯系统,整个系统的通讯架构大概如下图,典型的一主多从。...笔者目前的做法是,每个DSP的CAN的收发函数,首先有一个故障检测,一旦检测到故障,则CAN停止收发数...
”28377D的CAN通讯“ 的搜索结果
can/rs232通信协议
标签: 通信协议
该协议使用一条信号线进行传输,发送和接收的速率相对较慢,通常用于短距离的低速通信。各种设备可能使用不同的针脚进行通信,但是总线上的发送线(TX)、接收线(RX)、地线(GND)是必要的。偶校验表示数据字节中...
Ti的C28x的DSP_28377D的CAN通讯代码例程,里面有IO口、故障、波特率、发送、接收的函数
该例程为初始化TMS320F28377D之CAN通讯模块和为与外部终端通讯的中断程序
芯片:DSP28377D 外设:CAN 发送函数、中断接收函数,可以根据自己的需求修改,程序中注释很清楚,很好的适合小白的学习
DSP_28377D的CAN通讯代码例程Ti的C28x的DSP_28377D的CAN通讯代码例程,里面有IO口、故障、波特率、发送、接收的函数
笔者在项目中同时使用过两种DSP,一种是28069,另一种是28377D,这两个DSP主要是进行CAN通讯功能,完成整个系统的非实时通讯功能。 今天笔者主要想讨论的是28069与28377D的CAN外设,这两个DSP虽然都是Ti的,但CAN...


Ti的C28x的DSP_28377D的CAN通讯代码例程,里面有IO口、故障、波特率、发送、接收的函数 相关下载链接://download.csdn.net/download/weixin_39768579/10645213?utm_source=bbsseo
Can通讯 周立功 c++
CAN通讯原理简介(一)
标签: 网络





笔者最近在调试28377系列DSP芯片的can通讯时,遇到一个小问题,百思不得姐~ 起因是这样的,在设计一个多单元并联的系统,所有单元使用can总线进行通讯,当通讯端口,can外设,以及相关通讯协议都设计好后,开始使用...
由于DSP28377D芯片包含众多的外设,且开发DSP所涉及的知识面比较广。所以本文只是简要的对该芯片的一些重要特性进行介绍,以及对如何学习DSP的开发提出一些本人的想法。在后续的文章中,将会对其进行更加细致和系统...
这里提出一种基于TMS320LF2407A的双CAN口同步通讯板设计,TMS320LF2407A是TI公司推出的一款定点DSP控制器,它采用了高性能静态CMOS技术,使得供电电压降为3.3V,减小了控制器的功耗;40MIPS的执行速度使得指令周期...
默认情况下,EMIF1的写操作权限属于CPU1,如果想CPU2操作EMIF1,需要将权限交给CPU2: 1.EMIF1MSEL寄存器的KEY位域写0x93A5CE7;这是为了允许对MSEL_EMIF1位域的操作; 2. EMIF1MSEL寄存器的MSEL_EMIF1位域写10;...
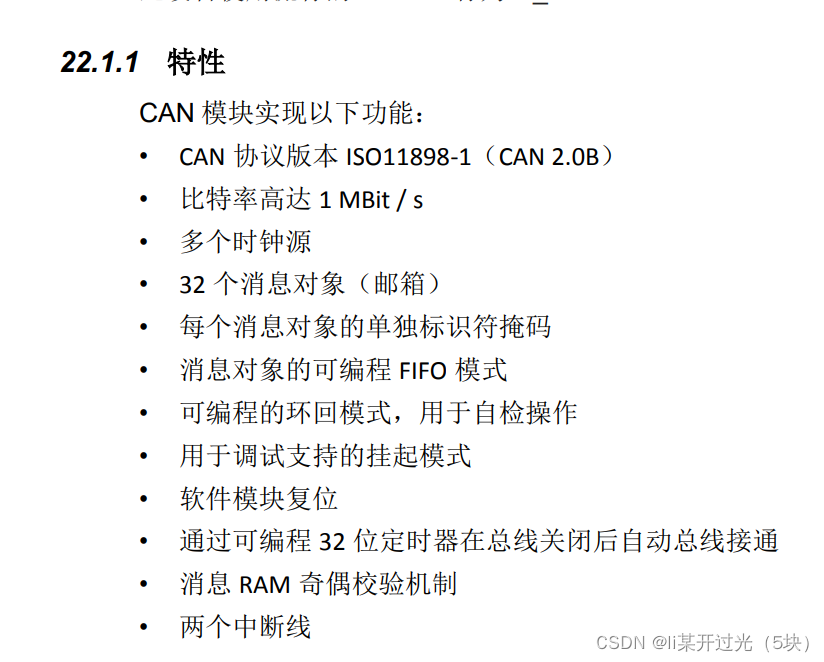
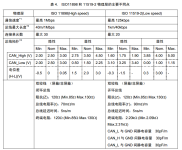
CAN是控制器局域网络(Controller Area Network, CAN)的简称,是一种能够实现分布式实时控制的串行通信网络。CAN 使用称为 CANH / CANL 的通信线路执行传输和接收。电位差较小的电信号称为隐性信号,其逻辑值为1。...
ESP32-S2 通过TWAI实现CAN通讯
STM32F407使用USB OTG与PC进行USB通讯


CAN通讯上位机,已经过验证,仅供参考学习使用

推荐文章
- YOLO V8车辆行人识别_yolov8 无法识别路边行人-程序员宅基地
- jpa mysql分页_Spring Boot之JPA分页-程序员宅基地
- win10打印图片中间空白以及选择打印机预览重启_win10更新后打印图片中间空白-程序员宅基地
- 【加密】SHA256加盐加密_sha256随机盐加密-程序员宅基地
- cordys 启动流程_cordys服务重启-程序员宅基地
- net中 DLL、GAC-程序员宅基地
- (一看就会)Visual Studio设置字体大小_visual studio怎么调整字体大小-程序员宅基地
- Linux中如何读写硬盘(或Virtual Disk)上指定物理扇区_dd写入确定扇区-程序员宅基地
- python【力扣LeetCode算法题库】面试题 17.16- 按摩师(DP)_一个有名的讲师,预约一小时为单位,每次预约服务之间要有休息时间,给定一个预约请-程序员宅基地
- 进制的转换技巧_10111100b转换为十进制-程序员宅基地