
”ROS学习“ 的搜索结果
项目中使用到ROS系统做SLAM和导航,本人第一次接触Linux系统和ROS系统,看过一些书籍文章之后觉得二者很有意思,便记录下来供后期复习。
在进行ros开发时,最基本的就是对消息进行订阅与发布。本博文,暂时订阅ROS自带话题/odometry/filtered 并保存到文档中,同时将其发布~ ...

ROS1采用分布式框架,其架构可以分为三个层次:基于Linux系统的OS层,实现ROS核心通信机制以及众多机器人开发库的中间层;在ROS Master的管理下保证功能节点的正常运行的应用层。ROS1的通信机制是每个节点通过ROS ...
ROS学习-----ubuntu16.04中ROS调用笔记本的摄像头显示,并在Rviz中进行摄像区域显示的目录一、打开ubuntu16.04之前的准备1、打开VM,点击我们ubuntu16.04右击,选择设置,如下所示:2、在设置页面选择usb控制器,并...
1.创建工作空间并创建话题通信的功能包 mkdir -p ~/topic_ws/src #递归创建目录,后面的名字必须是src cd ~/topic_ws #进入tocpic_ws目录 catkin_make echo 'source ~/topic_ws/devel/setup.bash'>...
本博文是基于这个ROS软件包(https://github.com/hrnr/m-explore)的学习笔记 multi robot exploration 这个包名为explore_lite,采用greedy frontier-based exploration。当节点运行时,机器人会贪婪地探索环境...

ROS开源社区中有很多SLAM算法,可以直接使用或者进行二次开发,其中最为常用和成熟的是gmapping功能包。其他的还有hector–slam和谷歌的cartographer包等等。 gmapping功能包集成了Rao–Blackwellized粒子滤波算法,...

ROS学习第一节——ROS下载
标签: 学习
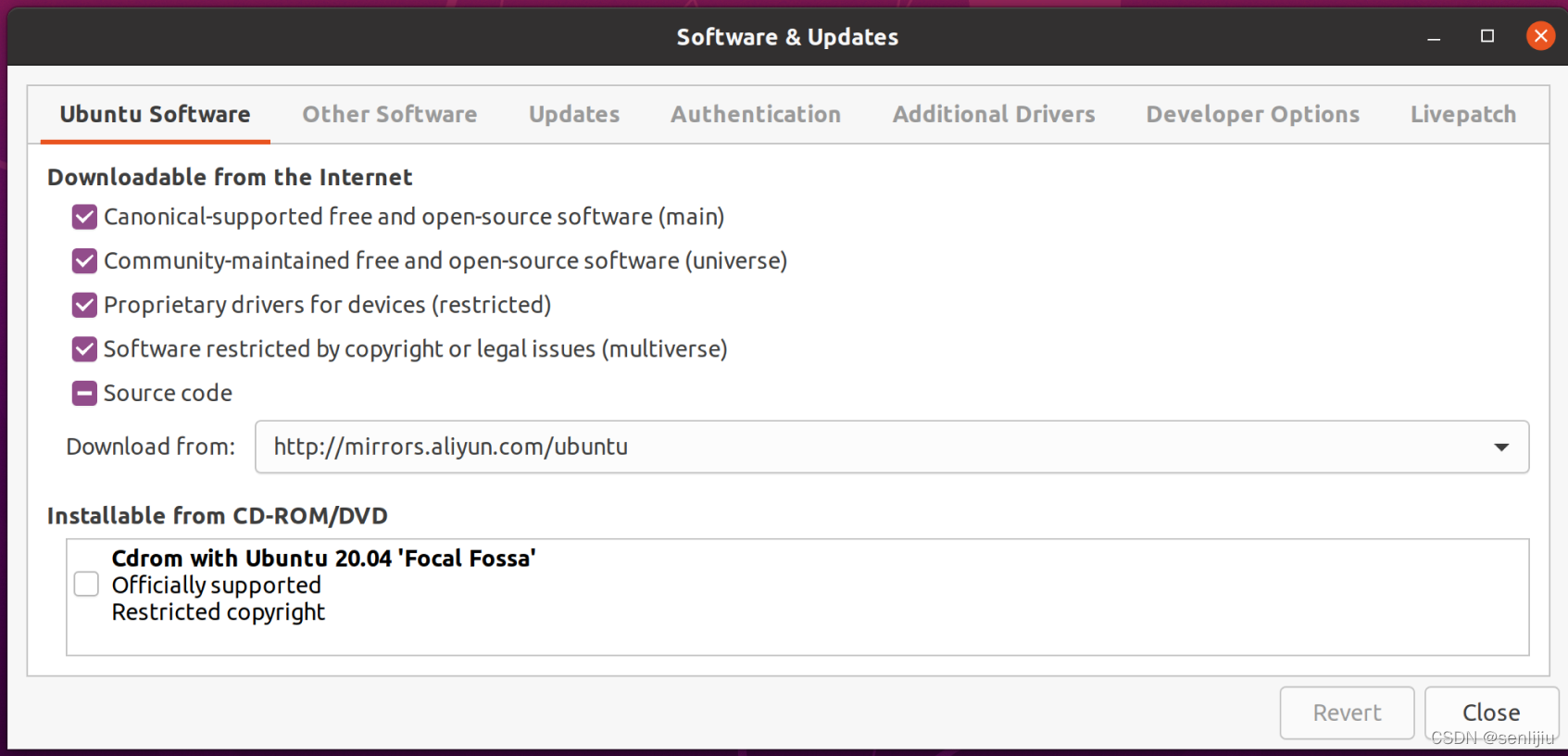
我自己安装的时候省略了第一部的手动更换镜像源,我是在鱼香ROS安装过程中选择更换的。ROS安装这一步我已经安装了无数次了,以下链接是最方便高效的安装方式。安装好了以后又安装了VScode,方便后期编程。

介绍了Ubuntu(ros)创建工作空间与创建功能包的简单操作, 介绍了ros的一些基本操作; 介绍话题的记录和复现
在ROS的应用中,常常会遇见一个节点接收了某个数据后,经过处理再转发出来。下面就这种情况给出在同一个节点实现发布、订阅消息的例子。
利用电脑相机标定
本篇是对ROS基础学习的一个总结。初学者可通过本篇博文对ROS有一个总体上的了解,也可获取一些学习资料,但是无法代替详尽的学习教程;有一定ROS基础者,可以通过本篇博文对ROS的基础知识进行一个回顾,...ROS学习笔...


目录前言ROS中目标检测模型的部署(rospy)demo测试ROS python模型部署后记 前言 Nanodet是我十分喜爱的一个超轻量目标检测...许多深度学习算法都是用python来写的,转成C++坑比较多,因此我选择先在rospy验证模型在ROS

ROS学习08-NVIDIA JETSON TX2安装配置激光雷达-思岚RPLIDAR S1(在Rviz上显示点位图) 在前一节我们创建了ROS工作空间,这一节开始要给我们的机器人装一些感官了,这里我们选用了思岚RPLIDAR S1,当然你也可以在机器人...

将usb_cam功能包安装到ros工作空间src下,并编译工作空间: cd catkin_ws/src git clone https://github.com/bosch-ros-pkg/usb_cam.git cd .. catkin_make 启动usb_cam_node节点: roscore cd catki...
ros 学习之计算机视觉资料总结
标签: 学习
相关ros功能包: ros中使用相关功能不需要重复开发。 可以 1 第三方软件 2 视觉设备与机器人相连 3 做仿真 相关说明: ros机械臂视觉抓取 Visual Servoing Visual Servoing 从视觉传感器获取反馈信息来控制机器人...


ROS官网wiki上的学习整理资料,适合初学者
推荐文章
- Android 编译so文件 MP4V2_android下编译mp4v2-程序员宅基地
- 通讯录Contact_02_contact文件内容-程序员宅基地
- Qt笔记(四十二)之QZXing的编译 配置 使用_qzxingfilterrunnable error:-程序员宅基地
- 关于画图软件Dia打开程序始终为英文界面的问题-程序员宅基地
- OpenCV从入门到精通实战(二)——文档OCR识别(tesseract)-程序员宅基地
- 详解avcodec_receive_packet 11_avcodec_receive_packet eagain-程序员宅基地
- OpenGL SuperBible 7th源码编译记录_superbible7-media github-程序员宅基地
- Wireshark简单使用-程序员宅基地
- MXNet 粗糙的使用指南_iou loss mxnet-程序员宅基地
- iOS对ipa包进行代码混淆《二》 ---代码混淆_ipa包混淆-程序员宅基地