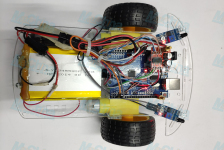
本文主要介绍使用整体结构小车底盘,外加Arduion控制板和LN298N控制板搭建一台智能遥控小车。以HX1838B作为控制信号接收模块,使用遥控器就能控制小车前进、后退、左转、右转功能。
”arduino控制小车转向“ 的搜索结果
首先,我们将舵机位置设置为90度(中间位置),然后等待1秒钟。最后,我们将舵机位置设置为180度(最右边位置),再次等待1...在本文中,我们将探讨如何使用Arduino来控制舵机和舵机控制板,从而实现小车的转向功能。

该程序源代码用于Arduino前轮舵机转向智能小车测速实验。 1、源代码开发软件:Arduino IDE; 2、程序对应处理器是:MEGA328P AU; 3、智能小车电机驱动芯片是:L293D; 4、智能小车电机为:TT直流减速电机; 5、需要...

免费的开源代码,仅供参考!(完全copy代码是没用的,因为地图不一样,车体不一样,循迹的位置不同,总之,硬件不同,软件相同也用不了别人的代码)
两个电机连接L289N的两个输出端,Arduino的PWM端连接L289N的信号输入引脚,由于采用两驱 前方采用万向轮 在起步时会出现万向轮转向导致不直线运动的问题。蓝牙模块直连 Arduino的0 1脚(烧录程序的过程中 需要拔掉)后...
【Arduino小车实践】PID应用之四驱小车(增量式)
Arduino控制小车
标签: Arduino
最核心的一部分是手势识别过程,通过Kinect传感器采集人的手部信息,将采集到的数据返回给Processing软件进行处理,将处理的结果通过计算机的串口发送给Arduino的串口,最后通过Arduino对电机进行控制,实现小车的...

你是否想在不构建电机控制器的情况下将运动功能添加到一个Arduino项目?那么伺服电机可能是最理想的选择。与直流电动机不同,您可以精确控制这些电动机的位置。指示他们指向何处。它们在许多机器人项目中很有用,...



该程序源代码用于Arduino前轮舵机转向智能小车手机APP蓝牙控制实验。 1、源代码开发软件:Arduino IDE; 2、程序对应处理器是:MEGA328P AU; 3、智能小车电机驱动芯片是:L293D; 4、智能小车电机为:TT直流减速...
#define E1 5 #define M1 4 #define E2 7 #define M2 6 /* E1 - HIGH 后转 / LOW 前转 M1 - 换向 E2 - HIGH 前转 / LOW 后转 M2 - 换向 */ char cmd; int data; void setup() { ... pinMode(M1,OU...
该程序源代码用于Arduino前轮舵机转向智能小车PS2手柄控制实验。 1、源代码开发软件:Arduino IDE; 2、程序对应处理器是:MEGA328P AU; 3、智能小车电机驱动芯片是:L293D; 4、智能小车电机为:TT直流减速电机; ...
该程序源代码用于Arduino前轮舵机转向智能小车前进后退循环运动实验。 1、源代码开发软件:Arduino IDE; 2、程序对应处理器是:MEGA328P AU; 3、智能小车电机驱动芯片是:L293D; 4、智能小车电机为:TT直流减速...

基于arduino的四路红外舵机寻线小车程序代码,比较简单的小白DIY
Arduino开发遥控小车(三)基于nRF24L01无线模块实现舵机转向和直流电机调速

该程序源代码用于Arduino前轮舵机转向智能小车超声波避障实验。 1、源代码开发软件:Arduino IDE; 2、程序对应处理器是:MEGA328P AU; 3、智能小车电机驱动芯片是:L293D; 4、智能小车电机为:TT直流减速电机; 5...
该程序源代码用于Arduino前轮舵机转向智能小车圆周运动实验。 1、源代码开发软件:Arduino IDE; 2、程序对应处理器是:MEGA328P AU; 3、智能小车电机驱动芯片是:L293D; 4、智能小车电机为:TT直流减速电机; 5、...
该程序源代码用于Arduino前轮舵机转向智能小车正反圆周运动实验。 1、源代码开发软件:Arduino IDE; 2、程序对应处理器是:MEGA328P AU; 3、智能小车电机驱动芯片是:L293D; 4、智能小车电机为:TT直流减速电机;...

看了这就是铁甲,想自己做一个可以遥控的小车。成功了!只是控制还不够精细。
Arduino平衡小车 1.概述 此Arduino平衡小车在主控方面由Arduino UNO R3和Arduino sensor shield v5.0传感器扩展板组成。采用TB6612FNG作为电源和电机之间的中介给带编码器的直流电机供电以及传送PWM信号。采用六轴...

推荐文章
- c语言链表查找成绩不及格,【查找链表面试题】面试问题:C语言学生成绩… - 看准网...-程序员宅基地
- 计算机网络:20 网络应用需求_应用对网络需求-程序员宅基地
- BEVFusion论文解读-程序员宅基地
- multisim怎么设置晶体管rbe_山东大学 模电实验 实验一:单极放大器 - 图文 --程序员宅基地
- 华为OD机试真题-灰度图恢复-2023年OD统一考试(C卷)-程序员宅基地
- 【机器学习】(周志华--西瓜书) 真正例率(TPR)、假正例率(FPR)与查准率(P)、查全率(R)_真正例率和假正例率,查准率,查全率,概念,区别,联系-程序员宅基地
- Python Django 版本对应表以及Mysql对应版本_django版本和mysql对应关系-程序员宅基地
- Maven的pom.xml文件结构之基本配置packaging和多模块聚合结构_pom <packaging>-程序员宅基地
- Composer 原理(二) -- 小丑_composer repositories-程序员宅基地
- W5500+F4官网TCPClient代码出现IP读取有问题,乱码问题_w5500 ping 网络助手 乱码 send(sock_tcps,tcp_server_buff,-程序员宅基地