STM32电机PID速度控制 编码器 1.概述 编码器(encoder)是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换成电信号,前者称为码盘,后者称为码尺。...
”pid“ 的搜索结果

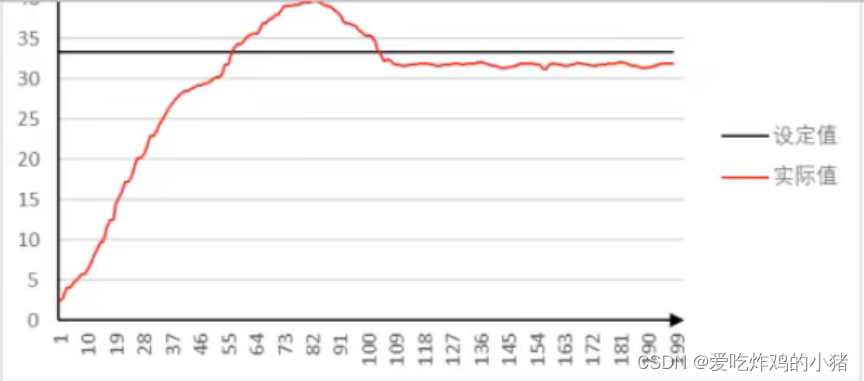
21-2-17 PID调试——增量式PID速度PID测试数据 速度PID 速度PID采用增量式PI控制 源码: 内联代码片。 void Motor_Speed_PI(motor_parameter_st *Motorx) { (*Motorx).PID_speed.bias = (*Motorx).actual_speed-(*...
串级PID调试simulink仿真 设计串级PID 串级PID图解: 在设计串级PID的时候,我们从图可以知道,主控制器的输出是副控制器的输入。 主控制器输出可以是输出实际的物理量,也可以输出百分比。若是输出实际物理量的值...
一、PID名字的由来: P:Proportion(比例),就是输入偏差乘以一个常数。 I:Integral(积分),就是对输入偏差进行积分运算。 D:Derivative(微分),对输入偏差进行微分运算。 注:输入偏差=读出的被控制对象的...
2013Liunx中通过进程名查找进程PID可以通过 pidof [进程名] 来查找。反过来 ,相同通过PID查找进程名则没有相关命令。在linux根目录中,有一个/proc的VFS(虚拟文件系统),系统当前运行的所有进程都对应于该目录下的...
增量式PID介绍 比例P : e(k)-e(k-1) 这次误差-上次误差 积分I : e(i) 误差 微分D : e(k) - 2e(k-1)+e(k-2) 这次误差-2*上次误差+上上次误差 du为增量,error前3偏差计算出来即可算出du;相对于位置式PID要...
增量式PID: △u(k)=Kp * e(k-1)+Ki *e(k) +Kd *(e(k)-2e(k-1)+e(k-2))+u(k-1); △u(k):实际输出量的变化量 u(k-1):上次的输出量 Kp : 比例系数 Ki : 积分系数 Kd :微分系数 e(k-1):上一次的目标和实际的误差值...

什么是串级PID?什么是串级PID?顾名思义就是两个串起来的PID,下面是一个双闭环的例子,外环是位置环,内环是速度环,最终的执行器是电机,电机输出产生了速度和位置;具体框图如下图所示;当...







自适应模糊PID控制将模糊控制与传统PID控制相结合,将两种控制方式进行结合,取长补短,对传统的算法进行优化,形成一种新的控制算法,自适应模糊PID控制可以用于很多场景,比如温度控制,机器人控制,过程控制等等...
PID的参数调整
前面我们发布了一系列PID控制器相关的文章,包括经典PID控制器以及参数自适应的PID控制器。这一系列PID控制器虽说实现了主要功能,也在实际使用中取得了良好效果,但还有很多的细节部分可以改进以提高性能和灵活性。...

前言 本文将讲述串级PID与单极PID的区别,并由此引出什么时候用串级PID,对于想深入学习PID的你有一定的帮助。



神经网络是智能控制的一个重要分支,人们针对控制过程提供了各种实现方式,在本节我们主要讨论一下采用单神经元实现PID控制器的方式。 1、单神经元的基本原理 单神经元作为构成神经网络的基本单位,具有自学习和...
PID算法原理 一简单的认识一下PID的三个参数的作用 以下的内容是我通过查阅了资料和加上我对PID的理解的总结,如果遇到有不对的地方,还望指出 先上一张图PID控制的结构图 关于PID控制,我相信很多小伙伴应该都听说...
小明接到这样一个任务: 有一个水缸点漏水(而且漏水的速度还不一定固定不变),要求水面高度维持在某个位置,一旦发现水面高度低于要求位置,就要往水缸里加水。 小明接到任务后就一直守在水缸旁边,时间长就觉得...
推荐文章
- Unity3D 导入资源_unity怎么导入压缩包-程序员宅基地
- jqgrid 服务器端验证,javascript – jqgrid服务器端错误消息/验证处理-程序员宅基地
- 白山头讲PV: 用calibre进行layout之间的比对-程序员宅基地
- java exit方法_Java:如何测试调用System.exit()的方法?-程序员宅基地
- 如何在金山云上部署高可用Oracle数据库服务_rman target sys/holyp#ssw0rd2024@gdcamspri auxilia-程序员宅基地
- Spring整合Activemq-程序员宅基地
- 语义分割入门的总结-程序员宅基地
- SpringBoot实践(三十五):JVM信息分析_怎样查看springboot项目的jvm状态-程序员宅基地
- 基于springboot+vue的戒毒所人员管理系统 毕业设计-附源码251514_戒毒所管理系统-程序员宅基地
- 【LeetCode】面试题57 - II. 和为s的连续正数序列_leet code 和为s的正数序列 java-程序员宅基地