AUTOSAR-CP:从软件架构到平台生态_autosar cp-程序员宅基地
技术标签: 汽车 软件构建 AUTOSAR浅出聊聊聊
纲
AUTOSAR-CP软件架构
AUTOSAR-CP软件平台
AUTOSAR-CP平台生态现状
AUTOSAR-CP平台未来展望
序
AUTOSAR-CP的软件架构和AUTOSAR-CP软件平台生态是密不可分的。前者是理论基础,是市面上所有AUTOSAR-CP软件平台在开发时的遵循的设计规范。后者是实践,是AUTOSAR-CP软件架构实际落地的工程产物,同时也是汽车软件工程师的工具和帮手。AUTOSAR-CP软件平台的重要性不言而喻,AUTOSAR-CP软件平台能够帮助公司快速、低人工成本、高质量地搭建出MCU软件系统。
本文旨在借助AUTOSAR-CP的软件架构理清汽车软件开发中AUTOSAR-CP软件平台的功能职责,然后向您介绍AUTOSAR-CP软件平台的生态现状与未来展望。

AUTOSAR-CP软件架构
架构图
AUTOSAR (Automotive Open System Architecture)是一种标准化的汽车电子系统架构,旨在提高汽车电子系统的互操作性、可重用性和可扩展性。AUTOSAR-CP (Classic Platform)是AUTOSAR标准的一个版本。
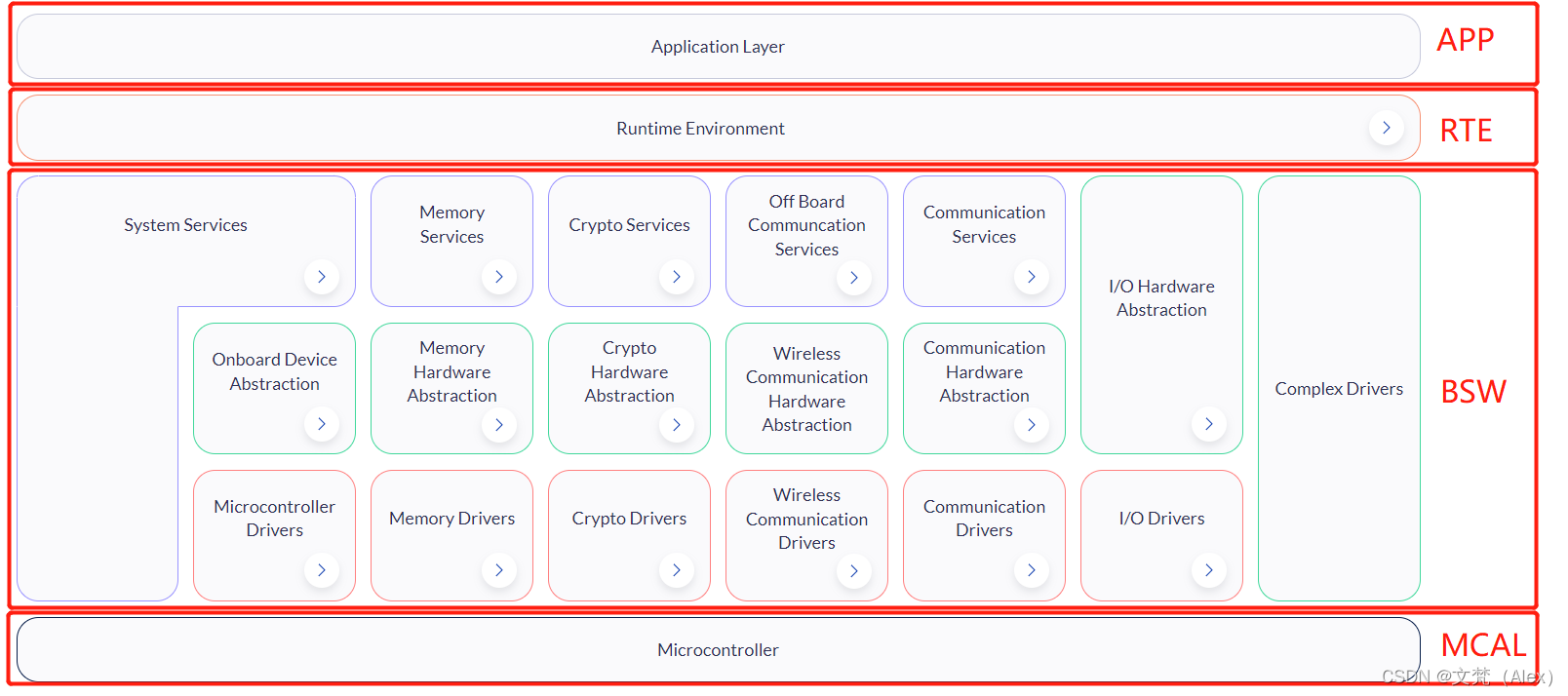
AUTOSAR-CP采用了分层架构。AUTOSAR-CP将整个系统划分为4个主要层次:应用层(APP)、运行时环境层(RTE)、基础软件层(BSW)和硬件抽象层(MCAL)。
应用层(APP):负责处理特定的业务逻辑,是整个系统的最顶层。一般会根据芯片承担的特定业务进行定制化开发。
运行时环境层(RTE):是APP和BSW之间的接口层,向上层(APP层)提供与硬件无关的接口和服务,是为了隔离APP和BSW而生的。承担的是操作系统中的“为用户提供接口”功能。同时为了满足复杂的汽车电子控制的系统设计和实现,RTE还提供“通信与事件处理、状态管理与错误处理、运行时配置、代码生成与集成”等功能。
基础软件层(BSW):提供了常见的功能库函数。通过各个功能模块共同承担的是操作系统中的“任务调度,内存管理”功能。除此以外AUTOSAR-CP作为汽车软件的专属架构,还需要在BSW层中为汽车应用场景提供丰富的软件工具,例如“通信接口、诊断服务、电源管理、安全管理、故障管理”等。
硬件抽象层(MCAL):是对底层硬件进行抽象,使上层软件可以独立于具体的硬件平台。承担的是操作系统中的“管理硬件”功能。
AUTOSAR-CP软件平台
AUTOSAR-CP软件平台是什么
AUTOSAR-CP平台是一套用于AUTOSAR-CP开发的软件工具。它基于AUTOSAR标准(满足上文介绍的AUTOSAR架构)提供了一个集成开发环境(IDE),可以用于设计、开发、测试和验证ECU软件。该工具支持多种ECU硬件平台和通信协议,并提供了丰富的功能和工具,如代码生成器、仿真器、调试器等,可以帮助开发人员快速、高效地开发出高质量的ECU软件。
AUTOSAR-CP从软件架构到软件平台
AUTOSAR-CP软件平台的介绍相当是抽象的,为了更加清晰地介绍AUTOSAR平台内容,这里我们结合AUTOSAR-CP软件架构一起来深入剖析:
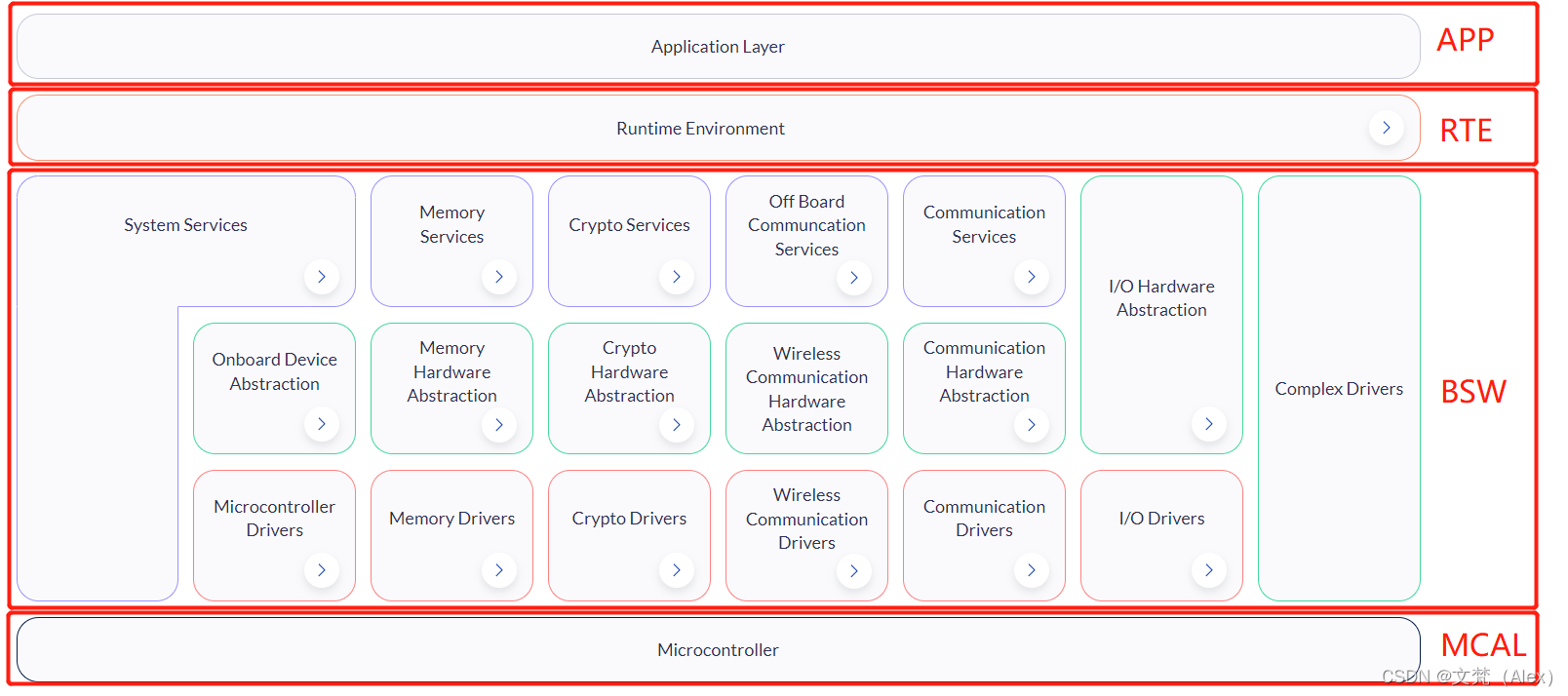
根据上文对AUTOSAR-CP架构的介绍:在AUTOSAR-CP标准中AUTOSAR架构被分为了应用层(APP)、运行时环境层(RTE)、基础软件层(BSW)和硬件抽象层(MCAL)四个大的层级。
应用层(APP):负责处理特定的业务逻辑,与业务强相关。由于各个厂商的技术方案五花八门,各个项目中对MCU的开发业务需求不经相同。因此AUTOSAR-CP软件平台并不直接参与APP的内容设计,需要根据自己对业务开发的需求自行设计和实现。
运行时环境层(RTE):AUTOSAR-CP软件平台向应用层提供接口的层级。AUTOSAR-CP软件平台在RTE层为应用层提供底层接口用以支持,因此RTE也常常被称为“软总线”。RTE实现了解耦和上下层分离,不管底层(BSW和MCAL)的配置情况如何,RTE提供的接口都是完全相同的。
基础软件层(BSW):这一层级是AUTOSAR-CP软件平台的心脏。最核心的任务调度,内存管理,功能集成都在这一层级。AUTOSAR-CP软件平台会提供一个IDE供开发工程师根据项目需要进行配置。然后AUTOSAR-CP软件平台会根据开发工程师的配置生成BSW代码。因此在BSW层级AUTOSAR-CP软件平台的任务很重,需要:1、提供IDE以供开发工程师配置 2、获得并生成配置文件 3、根据配置文件生成BSW代码。
硬件抽象层(MCAL):是对底层硬件进行抽象。同样的AUTOSAR-CP软件平台会提供一个IDE供开发工程师根据项目需要进行配置。与BSW层不同的是在MCAL层级AUTOSAR-CP软件平台是不会生成MCAL底层代码的,AUTOSAR-CP软件平台只负责生成配置文件去去控制MCAL底层代码,MCAL底层代码往往是由芯片厂提供和交付的。因此AUTOSAR-CP软件平台在MCAL的任务是:1、提供IDE以供开发工程师配置 2、获得并生成配置文件 3、根据配置文件控制MCAL底层代码。
做个简单的小结,AUTOSAR-CP软件平台在AUTOSAR-CP架构的各个层级中承担以下功能:
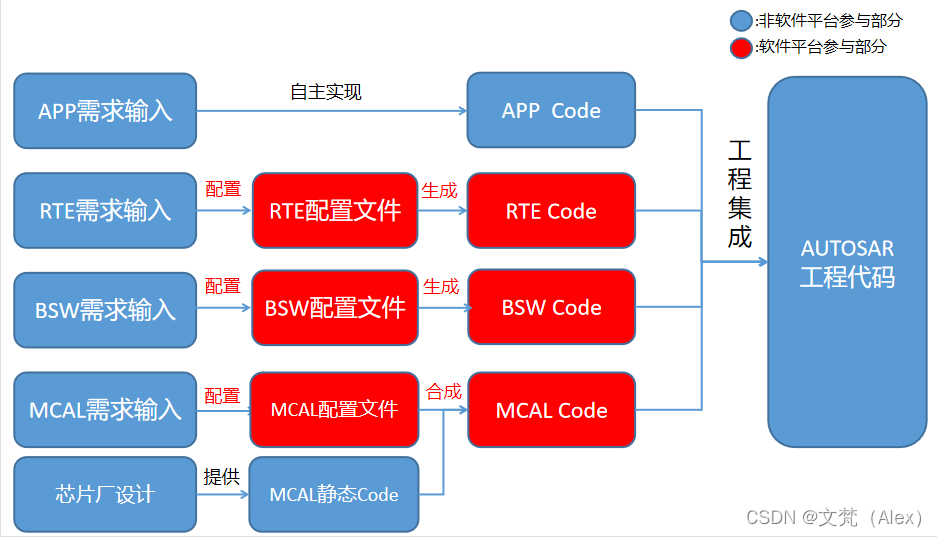
APP层需要自主实现
RTE层需要使用AUTOSAR软件平台进行配置和生成
BSW层需要使用AUTOSAR软件平台进行配置和生成
MCAL层需要使用AUTOSAR软件平台进行配置然后使用配置文件控制底层MCAL代码
AUTOSAR-CP平台生态现状
AUTOSAR-CP生态现状
AUTOSAR-CP架构从2003年开始设计、开发,至今已经走过20个年头。期间不断有新的厂商加入、新的问题被发现和解决。经过20年的开发、测试、修复、验证,AUTOSAR-CP架构已经相当完善和成熟。
作为AUTOSAR-CP架构下的MCU开发的核心工具,AUTOSAR-CP软件平台有着开发难度高、开发工作量大、质量要求高的开发难点。但同时也有着市场前景广、利润丰厚、技术壁垒高等优点。下面将从当前AUTOSAR-CP的行业生态现状的四个特点来介绍:
市场需求大:随着汽车电子系统的不断发展和普及,AUTOSAR-CP软件平台的市场需求也在不断增加。各大汽车厂商和供应商都在积极采用AUTOSAR-CP软件平台,以提高汽车电子系统的质量和性能。
技术门槛高:AUTOSAR-CP软件平台的开发和应用需要具备一定的技术实力和经验,对于大中小企业来说,技术门槛较高,需要投入大量的人力和物力。这也是AUTOSAR-CP软件平台想要解决的开发痛点。
市场竞争激烈:AUTOSAR-CP软件平台市场竞争激烈,各大厂商和供应商都在积极开发和推广自己的产品。
市场前景广:特别是中小企业,AUTOSAR-CP的开发模式尚未普及和使用,随着汽车电子系统的不断发展,AUTOSAR-CP软件平台的市场前景广阔。一旦使用价格合理,使用体验友好,中小企业也可以借助AUTOSAR-CP软件融入市场,实现安全且快速地发展。
总的来说,AUTOSAR-CP软件平台有市场大,前景广的行业特点,大企业可以在其中搭建平台,建立领域,借此平台中小企业也可以省时省力,把研发精力放在打磨自己的核心技术上,实现双赢,促进行业内共同发展。
AUTOSAR-CP软件平台产品
Vector:达芬奇

Vector是一家德国的汽车电子公司,其达芬奇工具是一套用于AUTOSAR软件开发的工具集。Vector的达芬奇工具历史可以追溯到2003年,当时Vector推出了第一个版本的达芬奇工具。随着AUTOSAR标准的不断发展和完善,Vector也不断更新和升级其达芬奇工具,以满足不同厂商的需求。目前,Vector的达芬奇工具已经成为了AUTOSAR软件开发领域的领先工具之一,被广泛应用于汽车电子系统的开发和测试中。当然除了AUTOSAR-CP软件平台:达芬奇以外,Vector还提供了其他一系列的汽车电子产品和解决方案,包括CAN总线分析仪、ECU测试工具等。
Vector的看家本领是诊断与成熟,因此在过去的很长一段时间里达芬奇平台工具凭借其对诊断的强力支持加上工具链完善,部署应用广等特点妥妥占据平台市场C位。但其高昂的价格,售后体验差也让不少公司望而却步。是的,达芬奇的lincense多且复杂,收费及其昂贵。花高价买来的是成熟的软件和详尽的文档,但不包括贴心的管家,几乎不支持定制化,如果有问题想和Vector沟通则会发现反馈周期巨长。完美地诠释了什么叫“Vector's roof,Vector's rules”
EB:tresos

EB同样是一家来自德国的汽车软件公司,全称是Elektrobit。在2006年时推出自己的第一款AUTOSAR-CP软件平台工具tresos。同样的tresos是一套完整的工具包,能够胜任AUTOSAR-CP开发中的RTE、BSW、MCAL多个层级的开发工作。
tresos的看家本领是底层支持。tresos与芯片厂深度合作,MCAL层的配置一直是他的强项,开发者不但可以使用tresos的全套AUTOSAR-CP解决方案,还可以根据自己的需求选择部分服务,例如可以只使用tresos的MCAL配置服务再搭配其他公司的BSW+RTE产品。
相比于达芬奇,tresos在BSW的诊断和整体AUTOSAR-CP软件平台的成熟度方面都要稍逊一些,但是由于其在MCAL配置方面的专长:tresos实现MCAL+达芬奇实现BSW&RTE+自主研发APP在很长时间都是头部车企的通用解决方案。
普华:ORIENTAIS

近年来随这国内的电动造车热,与雨后春笋的国内新平台新势力不同,普华是在2010年就成为了AUTOSAR协会成员是最早一批接受AUTOSAR架构的公司之一(当然经纬恒润是最早的,在07年就已成为AUTOSAR协会成员),同时也是中电科旗下的老弟。融入国际体系+国家队大力支持的打法在普华身上体现得淋漓尽致。并未辜负期望的是,普华的产品和发展确实是令人骄傲,前不久获得了AISL D的安全认证,也证明了其在保证汽车功能安全上的底蕴和实力。
普华的看家本领是专精细分领域。在整车网络测试特别是CAN\LIN总线方面普华有相当的实力。但普华的软件产品同样也是价格不菲,更加致命的是对全AUTOSAR系统的支持力度不够,所以近几年普华也是在健全平台方面持续发力,在不太擅长的领域与其他厂商合作,尝试建立一套全面且完善的解决方案。
华为:VOS

华为和VECTOR、普华等“中立的”技术提供商不太相同,华为是相当深度地参与到汽车软件设计和实现过程中的。深度合作的战略引用华为著名的007号文件来说就是“华为帮车企造好车”。这种深度参与造车,但不下场造车的平台合作模式相当有创意,在充分华为ICT主场优势的同时还起到了规避风险的作用。
华为的看家本领是深度参与、快速迭代,相当适合希望与华为共同成长,深度交流的公司进行合作。但市场上对这种“深度参与”合作的方式褒贬不一。因为在这种模式下常常会出现“我请你来帮我写代码,你却想当我的爹?”的情况。同时由于VOS的战略目标很宏大:全系统支持AUTOSAR-CP。但实际落地的时间比较短,现阶段VOS及其配套的工具链的成熟度还是有待提升的,bug率比达芬奇要高。只能说我们国内的AUTOSAR-CP软件平台发展还需要时间,现在的VOS正处在:“This is not the end. It is not even the beginning of the end. But it is, perhaps, the end of the beginning.”
小结
当然AUTOSAR-CP软件平台的产品远不只上面介绍的四款,市场上还有:Mentor公司的Volcano、ETAS(博世)公司的ISOLAR、东软睿驰公司的NeuSAR、经纬恒润公司的EAS等平台产品和解决方案。很明显现在的AUTOSAR-CP软件平台市场还是处在残酷的“血龙狂舞”时代。
AUTOSAR-CP平台未来展望
CP+AP联合发展
AUTOSAR-AP是为了满足快速增长的汽车软件需求而设计的自适应平台架构。主要用于高性能,大量新需求的应用场景,例如辅助驾驶场景。在很长的时间内AUTOSAR-AP和AUTOSAR-CP的关系是合作不是竞争,因为CP虽然难以满足与日俱增的大量新需求使用场景,但是AUTOSAR-CP架构具有硬实时,工程成熟,部署时间短等优点,未来很长时间都会和AP紧密联系且共同发展。
因此多数AUTOSAR软件提供商都在走AP+CP协同发展的道路,即为车企提供强壮的用于砍骨头的“砍刀”,又为车企提供锋利的用于片肉的“片刀”,实现既能砍又能片的一体化烹饪方案。
平台本土化
为什么平台本土化是我们国内AUTOSAR-CP的未来发展方向?除了国家软硬件本土化,数字本土化的浪潮外还有以下几个原因:
1)国内市场近年来造车热,汽车软件行业市场需求增加。
2)国内市场不少车企有国企背景,对于软件安全(特别是数据安全)高度敏感,不愿意过多使用国外方案。
3)国内市场未使用AUTOSAR-CP的中小企业多,AUTOSAR-CP的推广潜力大,建立平台并普及有很好的前景。
4)国内平台可以针对国外软件价格高,售后服务周期长,难以实现定制化等痛点打开国内AUTOSAR市场。
智能推荐
解决win10/win8/8.1 64位操作系统MT65xx preloader线刷驱动无法安装_mt65驱动-程序员宅基地
文章浏览阅读1.3w次。转载自 http://www.miui.com/thread-2003672-1-1.html 当手机在刷错包或者误修改删除系统文件后会出现无法开机或者是移动定制(联通合约机)版想刷标准版,这时就会用到线刷,首先就是安装线刷驱动。 在XP和win7上线刷是比较方便的,用那个驱动自动安装版,直接就可以安装好,完成线刷。不过现在也有好多机友换成了win8/8.1系统,再使用这个_mt65驱动
SonarQube简介及客户端集成_sonar的客户端区别-程序员宅基地
文章浏览阅读1k次。SonarQube是一个代码质量管理平台,可以扫描监测代码并给出质量评价及修改建议,通过插件机制支持25+中开发语言,可以很容易与gradle\maven\jenkins等工具进行集成,是非常流行的代码质量管控平台。通CheckStyle、findbugs等工具定位不同,SonarQube定位于平台,有完善的管理机制及强大的管理页面,并通过插件支持checkstyle及findbugs等既有的流..._sonar的客户端区别
元学习系列(六):神经图灵机详细分析_神经图灵机方法改进-程序员宅基地
文章浏览阅读3.4k次,点赞2次,收藏27次。神经图灵机是LSTM、GRU的改进版本,本质上依然包含一个外部记忆结构、可对记忆进行读写操作,主要针对读写操作进行了改进,或者说提出了一种新的读写操作思路。神经图灵机之所以叫这个名字是因为它通过深度学习模型模拟了图灵机,但是我觉得如果先去介绍图灵机的概念,就会搞得很混乱,所以这里主要从神经图灵机改进了LSTM的哪些方面入手进行讲解,同时,由于模型的结构比较复杂,为了让思路更清晰,这次也会分开几..._神经图灵机方法改进
【机器学习】机器学习模型迭代方法(Python)-程序员宅基地
文章浏览阅读2.8k次。一、模型迭代方法机器学习模型在实际应用的场景,通常要根据新增的数据下进行模型的迭代,常见的模型迭代方法有以下几种:1、全量数据重新训练一个模型,直接合并历史训练数据与新增的数据,模型直接离线学习全量数据,学习得到一个全新的模型。优缺点:这也是实际最为常见的模型迭代方式,通常模型效果也是最好的,但这样模型迭代比较耗时,资源耗费比较多,实时性较差,特别是在大数据场景更为困难;2、模型融合的方法,将旧模..._模型迭代
base64图片打成Zip包上传,以及服务端解压的简单实现_base64可以装换zip吗-程序员宅基地
文章浏览阅读2.3k次。1、前言上传图片一般采用异步上传的方式,但是异步上传带来不好的地方,就如果图片有改变或者删除,图片服务器端就会造成浪费。所以有时候就会和参数同步提交。笔者喜欢base64图片一起上传,但是图片过多时就会出现数据丢失等异常。因为tomcat的post请求默认是2M的长度限制。2、解决办法有两种:① 修改tomcat的servel.xml的配置文件,设置 maxPostSize=..._base64可以装换zip吗
Opencv自然场景文本识别系统(源码&教程)_opencv自然场景实时识别文字-程序员宅基地
文章浏览阅读1k次,点赞17次,收藏22次。Opencv自然场景文本识别系统(源码&教程)_opencv自然场景实时识别文字
随便推点
ESXi 快速复制虚拟机脚本_exsi6.7快速克隆centos-程序员宅基地
文章浏览阅读1.3k次。拷贝虚拟机文件时间比较长,因为虚拟机 flat 文件很大,所以要等。脚本完成后,以复制虚拟机文件夹。将以下脚本内容写入文件。_exsi6.7快速克隆centos
好友推荐—基于关系的java和spark代码实现_本关任务:使用 spark core 知识完成 " 好友推荐 " 的程序。-程序员宅基地
文章浏览阅读2k次。本文主要实现基于二度好友的推荐。数学公式参考于:http://blog.csdn.net/qq_14950717/article/details/52197565测试数据为自己随手画的关系图把图片整理成文本信息如下:a b c d e f yb c a f gc a b dd c a e h q re f h d af e a b gg h f bh e g i di j m n ..._本关任务:使用 spark core 知识完成 " 好友推荐 " 的程序。
南京大学-高级程序设计复习总结_南京大学高级程序设计-程序员宅基地
文章浏览阅读367次。南京大学高级程序设计期末复习总结,c++面向对象编程_南京大学高级程序设计
4.朴素贝叶斯分类器实现-matlab_朴素贝叶斯 matlab训练和测试输出-程序员宅基地
文章浏览阅读3.1k次,点赞2次,收藏12次。实现朴素贝叶斯分类器,并且根据李航《统计机器学习》第四章提供的数据训练与测试,结果与书中一致分别实现了朴素贝叶斯以及带有laplace平滑的朴素贝叶斯%书中例题实现朴素贝叶斯%特征1的取值集合A1=[1;2;3];%特征2的取值集合A2=[4;5;6];%S M LAValues={A1;A2};%Y的取值集合YValue=[-1;1];%数据集和T=[ 1,4,-1;..._朴素贝叶斯 matlab训练和测试输出
Markdown 文本换行_markdowntext 换行-程序员宅基地
文章浏览阅读1.6k次。Markdown 文本换行_markdowntext 换行
错误:0xC0000022 在运行 Microsoft Windows 非核心版本的计算机上,运行”slui.exe 0x2a 0xC0000022″以显示错误文本_错误: 0xc0000022 在运行 microsoft windows 非核心版本的计算机上,运行-程序员宅基地
文章浏览阅读6.7w次,点赞2次,收藏37次。win10 2016长期服务版激活错误解决方法:打开“注册表编辑器”;(Windows + R然后输入Regedit)修改SkipRearm的值为1:(在HKEY_LOCAL_MACHINE–》SOFTWARE–》Microsoft–》Windows NT–》CurrentVersion–》SoftwareProtectionPlatform里面,将SkipRearm的值修改为1)重..._错误: 0xc0000022 在运行 microsoft windows 非核心版本的计算机上,运行“slui.ex