汽车理论笔记——第五章 汽车的操纵稳定性_汽车操纵稳定性的评价指标-程序员宅基地
汽车的操纵稳定性是指在驾驶者不感到过分紧张、疲劳的情况下,汽车能遵循驾驶者通过转向系统及转向车轮给定的方向行驶,且当遭遇外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力(操纵+稳定)
汽车的操纵稳定性是汽车主动安全性的重要评价指标。
一、操纵稳定性包含的内容
汽车的操纵稳定性研究内容较广泛,涉及较多的评价指标。下面做简要介绍:
- 汽车在转向盘输入或外界干扰输入下的侧向运动响应随时间而变化的特性称为时域响应特性
- 转向盘输入有角位移输入和力矩输入
- 外界干扰输入主要是指侧向风和路面不平产生的侧向力
(第一个最重要)

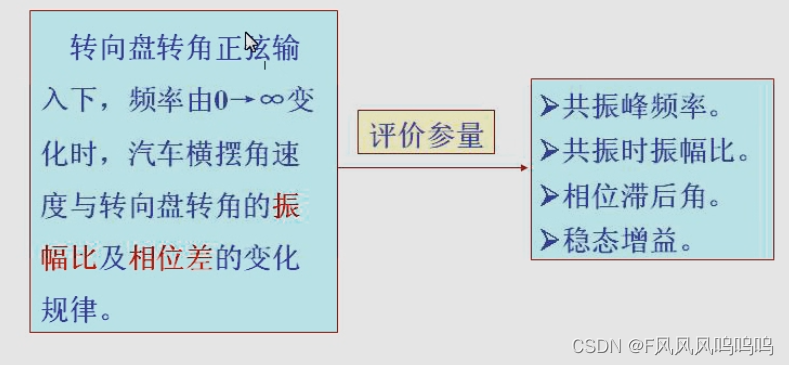
2.横摆角速度频率响应特性
3.转向盘中间位置操纵稳定性

4.回正性

5.转向半径(评价参量:最小转向半径)
6.转向轻便性
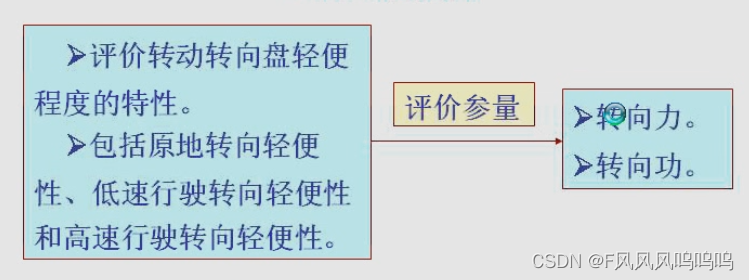
Tips:目前部分轿车上使用的电动助力转向系统 (EPS)能很好地兼顾各种车速下行驶时的转向轻便性
7.直线行驶性能

8.典型行驶工况性能
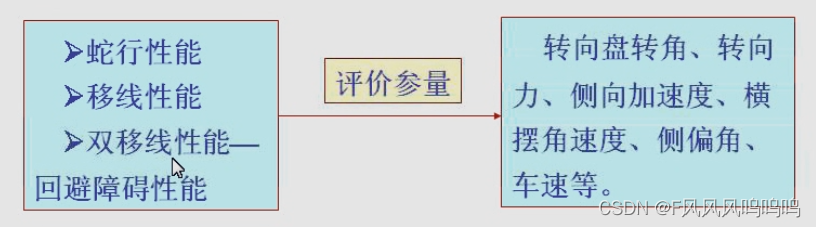
Tips:在汽车性能参数里,往往以应急性能给出。主要包括:蛇行绕桩速度(满载/空载)、紧急变线速度(满载/空载)
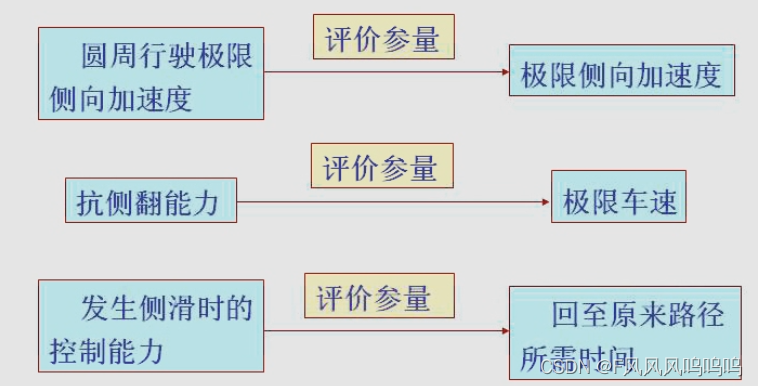
9.极限行驶能力
二、车辆坐标系与转向盘角阶跃输入下的时域响应
1.车辆坐标系

2.稳态响应特性
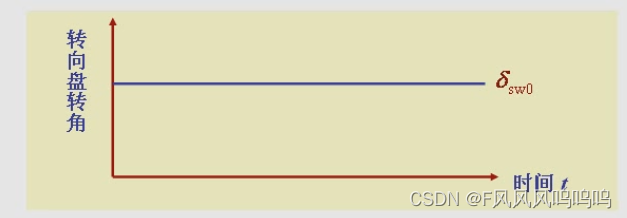
- 汽车直线行驶时,急速转动转向盘至某一转角时,停止转动转向盘并维持此转角不变,即给汽车以转向盘角阶跃输入。
- 转向盘角阶跃输入经短暂时间后,汽车进入等速圆周行驶,称为转向盘角阶跃输入下进入的稳态响应

3.瞬态响应特性


三、操纵稳定性的研究方法
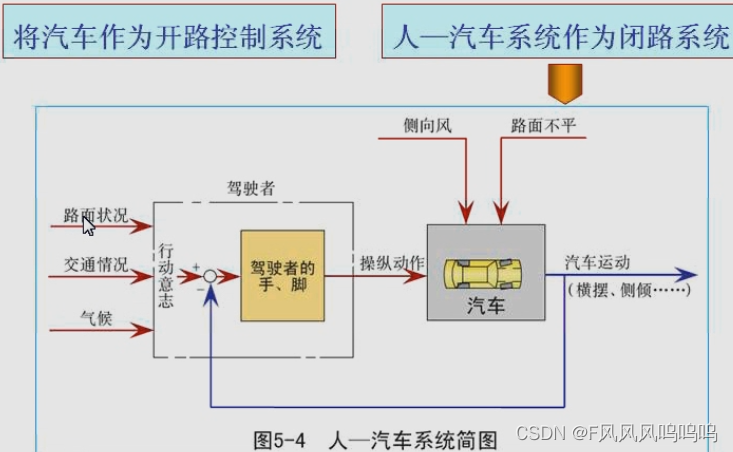
显然,对于操稳性,闭路系统模型是更符合实际的,但研究起来更复杂;在其他性能的研究中,反馈可能不重要
四、操纵稳定性的两种试验评价方法

- 主观评价法也存在两个严重缺陷:受到评价者个人主观因素的影响,不同评价者可能给出差别极大的评价结果; 不能给出“汽车性能”与“汽车结构”之间关系的信息。
- 研究汽车的操纵稳定性,闭路系统是非常真实的,但其理论模型的建立和分析非常复杂。为此还是采用开路模型,利用客观评价法来分析汽车的操纵稳定性。
第二节 轮胎的侧偏特性
本节主要研究轮胎的侧偏现象和侧偏特性。>侧偏特性是指侧偏力、回正力矩与侧偏角的关系
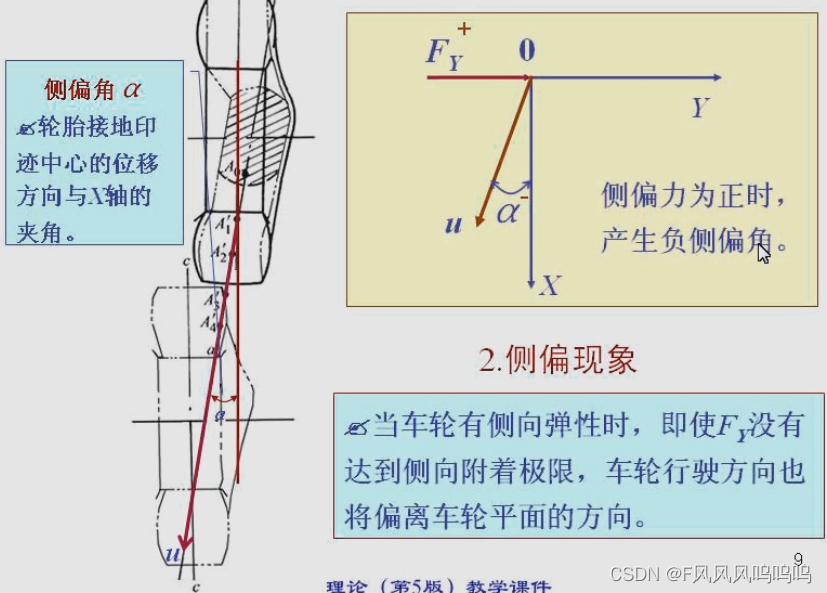
1.轮胎的坐标系(侧偏角很重要,右手定则:拇指朝上,四指为正向侧偏角)


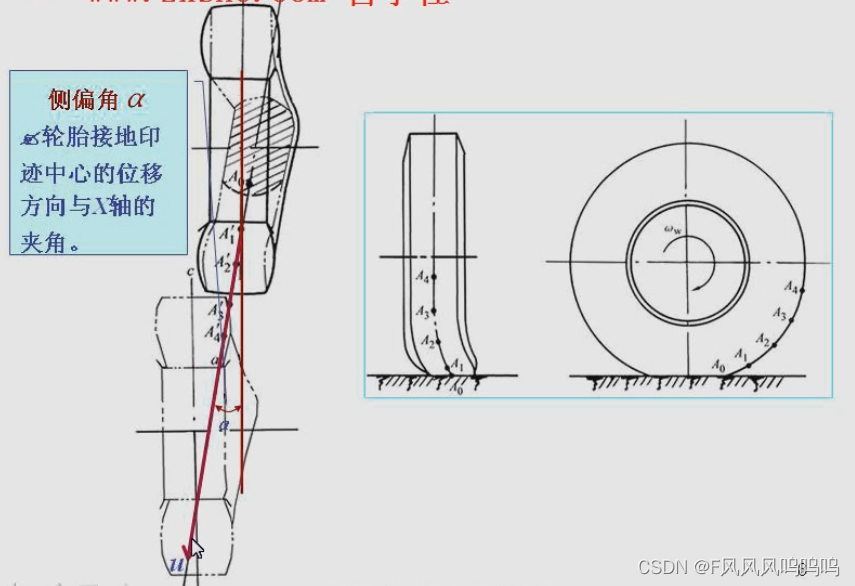
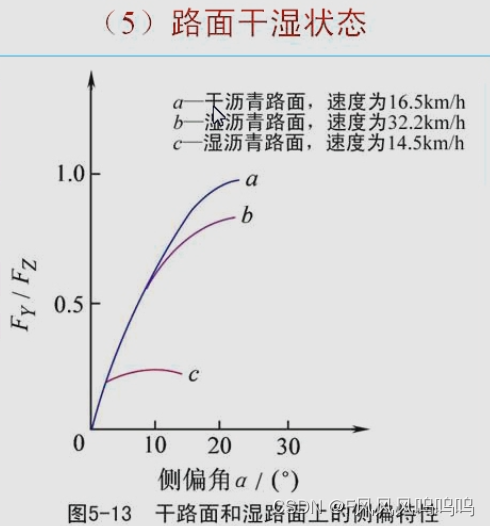
二、轮胎的侧偏现象和侧偏力一侧偏角曲线
1.侧偏力



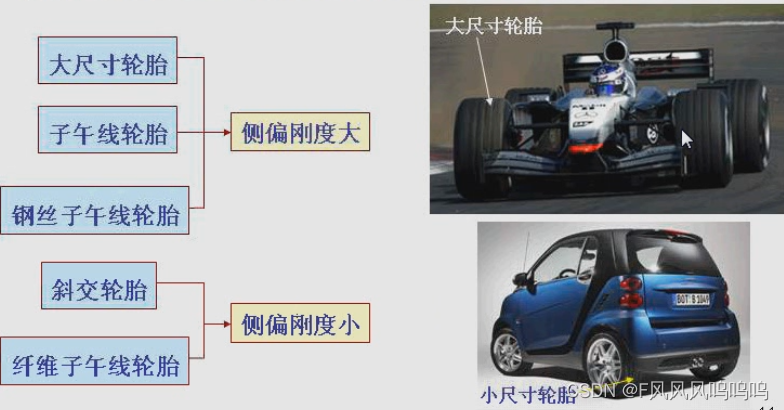
三、轮胎结构、工作条件对侧偏特性的影响
1)轮胎的尺小、型式和结构参数对侧偏刚度有显著影响
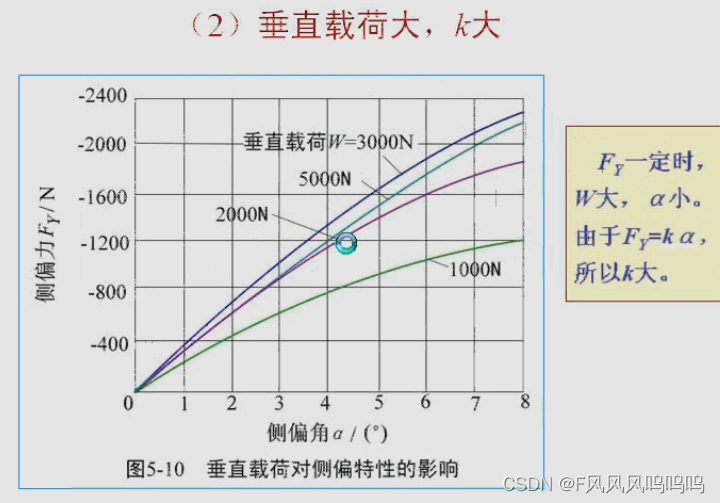
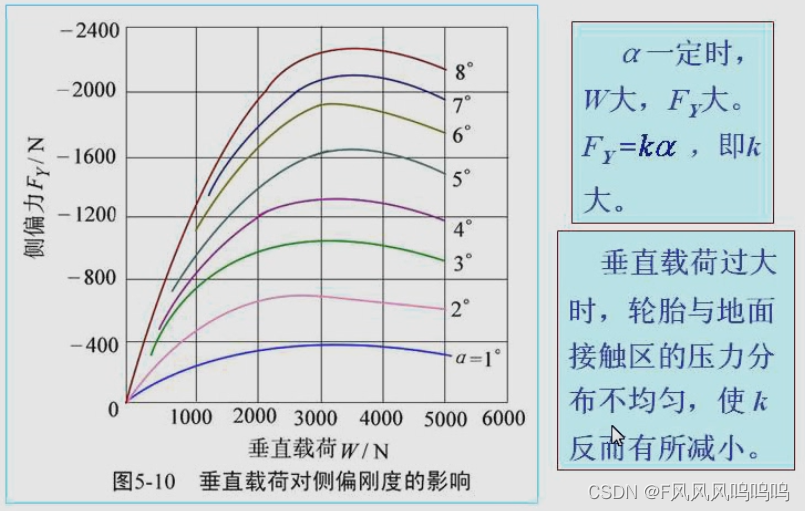
2)垂直载荷大,k大(垂直载荷过度增会使侧偏刚)
总结:对侧偏刚度影响最大的两个因素:轮胎自身的结构和垂直载荷。

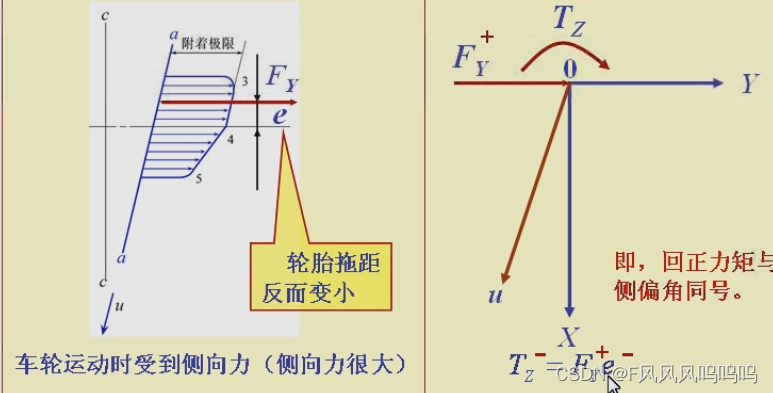
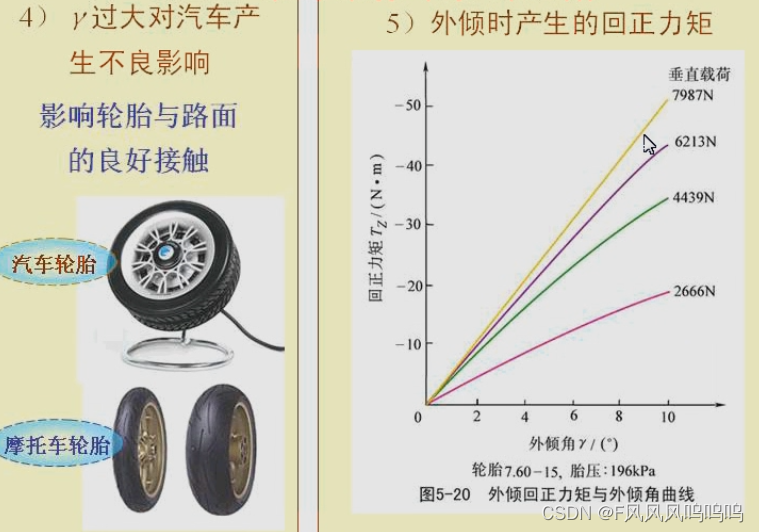
四、回正力矩(轮胎发生侧偏时,会产生作用于轮胎绕OZ轴的力矩,该力矩称为回正力矩)
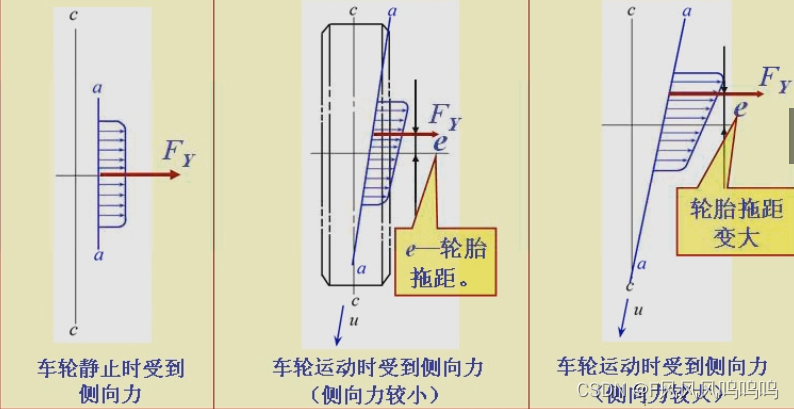
侧偏力往左,车辆向左转弯
![]()
第三节 线性二自由度汽车模型对前轮角输入的响应
将首先建立线性二自由度汽车模型:在此基础上,分析汽车的稳态响应特性、瞬态响应特性和频率响应特性
一、线性二自由度汽车模型运动微分方程
1.建模中假设

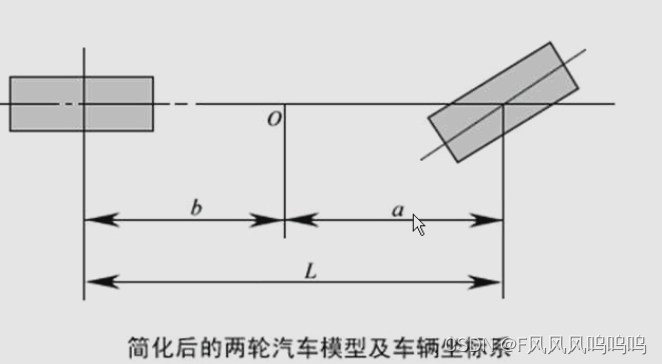
在上述假设下,汽车被简化为只有侧向和横摆两个自由度的两轮汽车模型。且同一车轴左右车轮的侧偏刚度相同。

2.两轮汽车模型及车辆坐标系

3.运动学分析


沿y方向的加速度
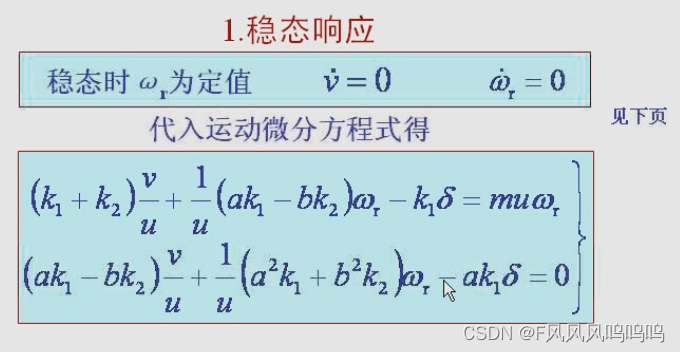
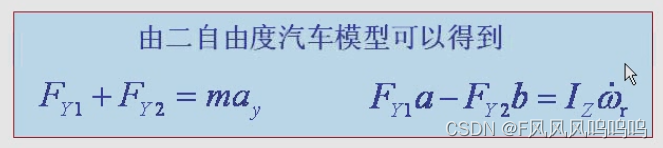
4.二自由度汽车动力学分析
该部分公式推导很麻烦,需要记住下面的核心公式:

该方程用汽车结构参数和使用参数反映了二自由度汽车模型做曲线运动的基本关系。
此方程本身并未限定输入形式(阶跃还是正弦...),也不表明稳态还是瞬态。
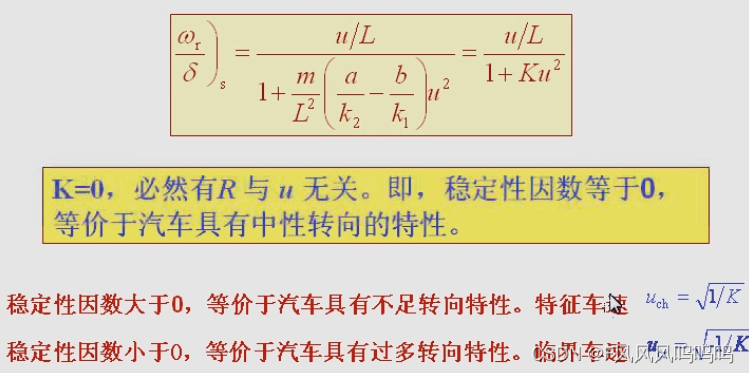
二、前轮角阶跃输入下汽车的稳态响应一等速圆周行驶
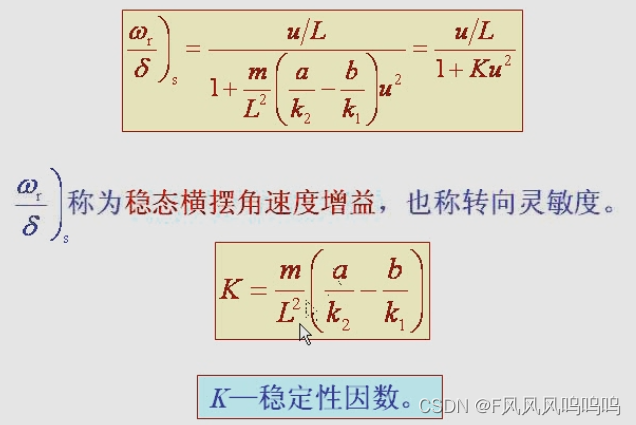
可见,稳定性因数取决于车辆结构参数,其正负取决于侧偏刚度和质心位置的匹配
2.稳态响应的三种类型
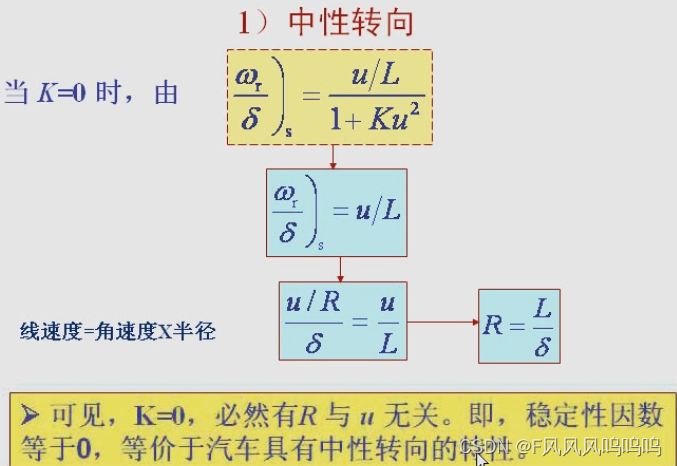
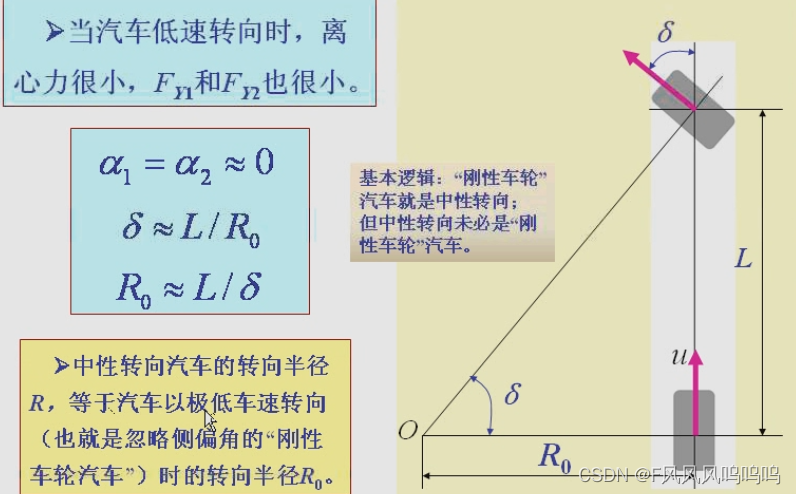
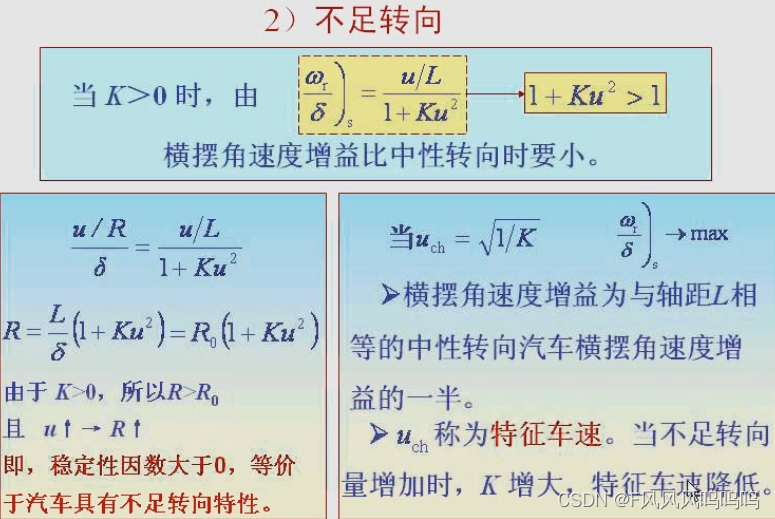

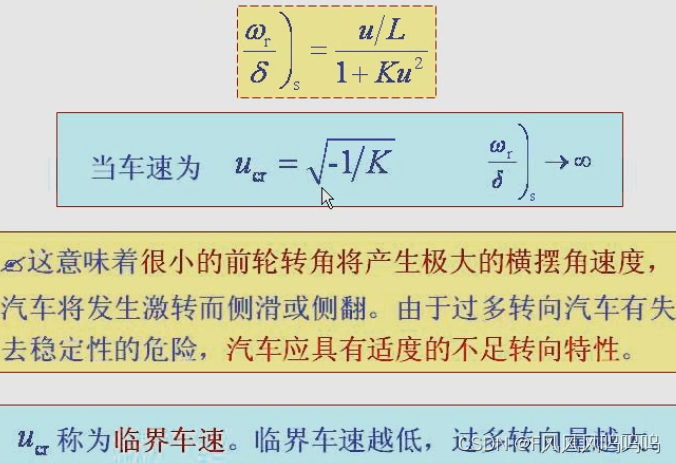
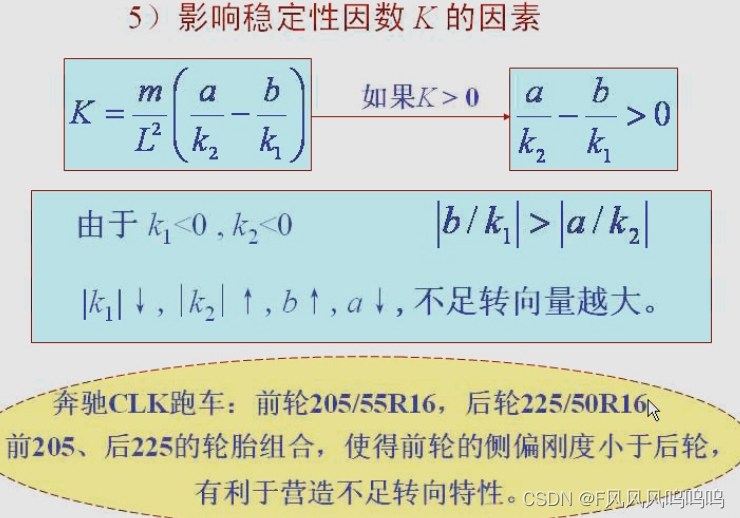
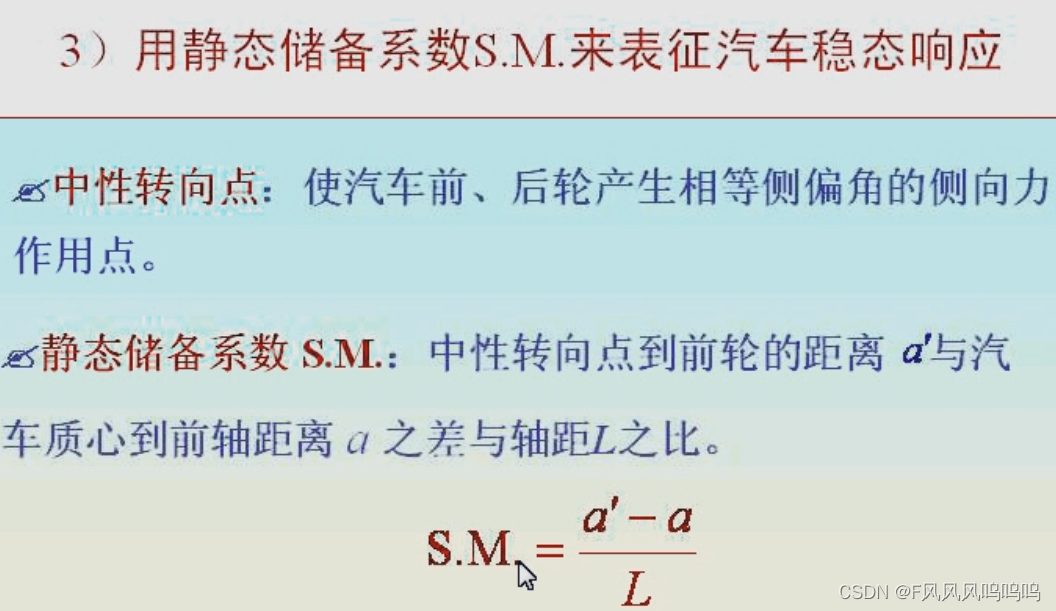
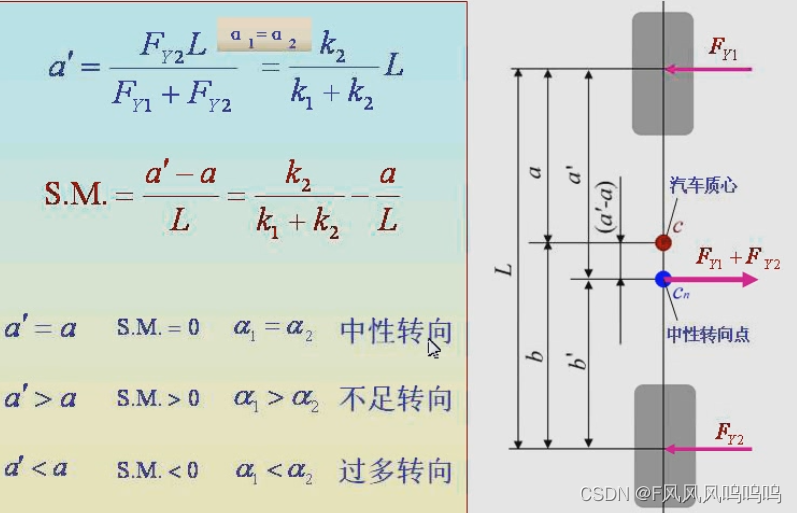
3.几个表征稳态响应的参数

定性分析前轮侧偏角,对转向有削弱作用;而后轮侧偏对转向则是一种加剧


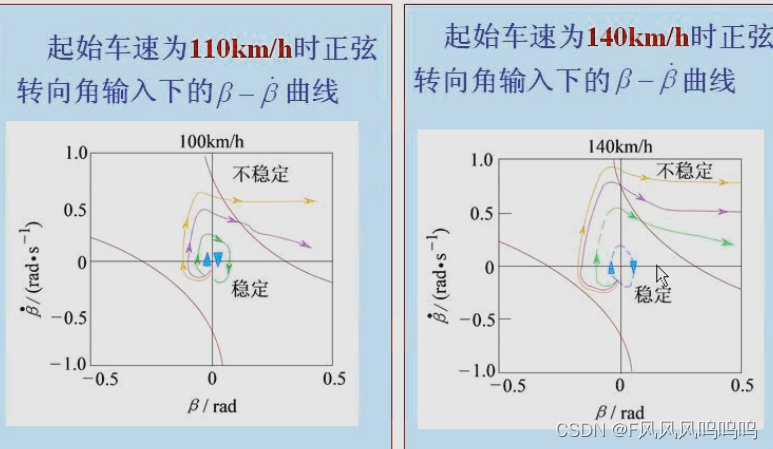
三、前轮角阶跃输入下的瞬态响应
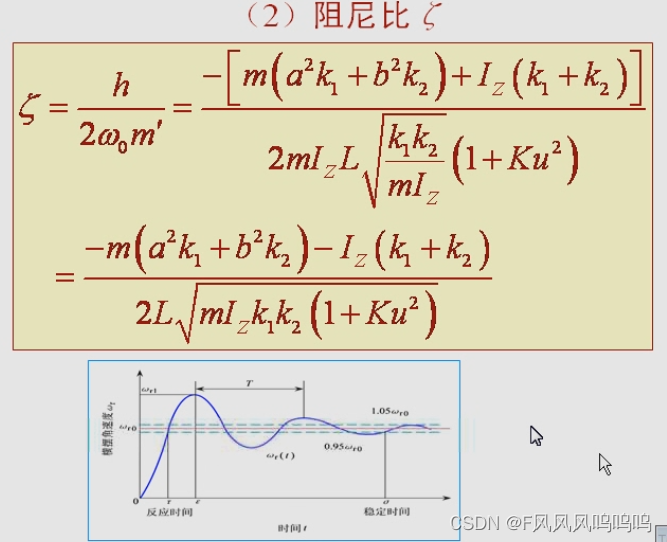
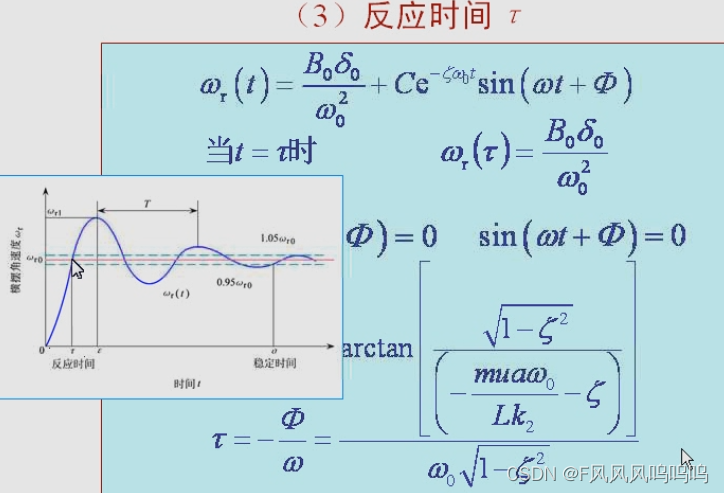
瞬态响应是一个比较短暂而又非常复杂的过程。在此,仅对其响应品质和稳定条件做简要介绍
表征响应品质好坏的4个瞬态响应的参数


第四节 汽车操纵稳定性与悬架的关系
本节将学习弹性侧偏角、 侧倾转向角和变形转向角等基本概念,分析不同悬架及参数对汽车操纵稳定性的影响,了解改善汽车操纵稳定性的方法。
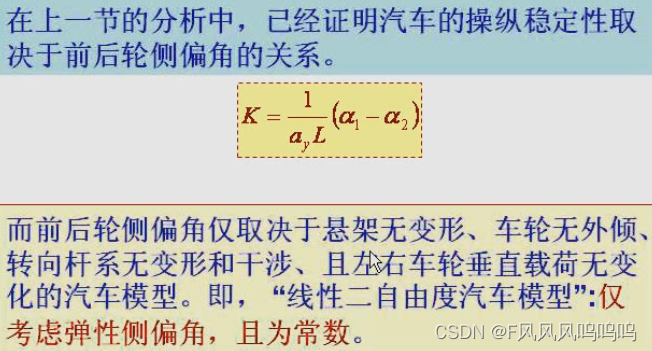
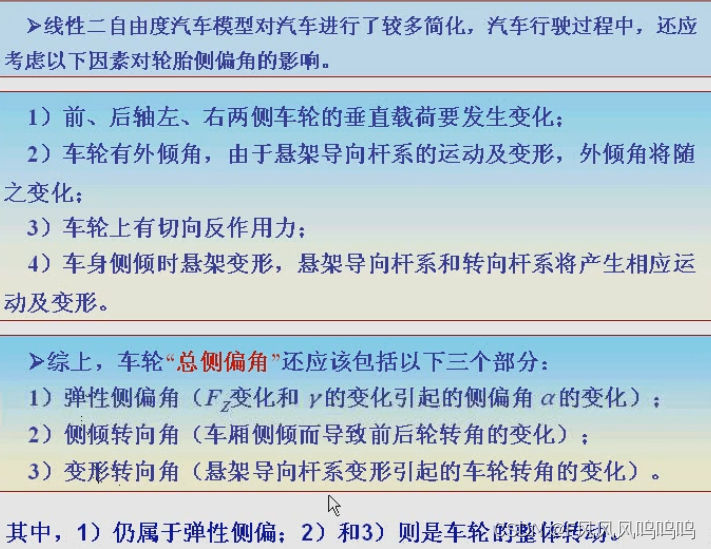
线性二自由度汽车模型对汽车进行了较多简化,汽车行驶过程中,还应考虑以下因素对轮胎侧偏角的影响:
1) 前、后轴左、右两侧车轮的垂直载荷要发生变化
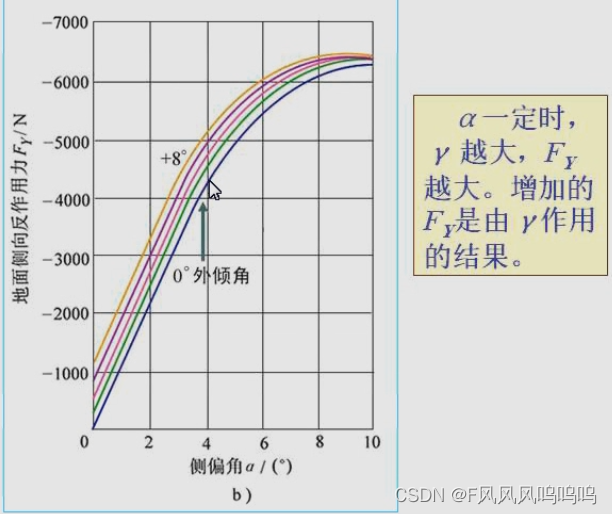
2) 车轮有外倾角,由于悬架导向杆系的运动及变形,外倾角将随之变化
3) 车轮上有切向反作用力
4) 车身侧倾时悬架变形,悬架导向杆系和转向杆系将产生相应运动及变形
一、车厢侧倾
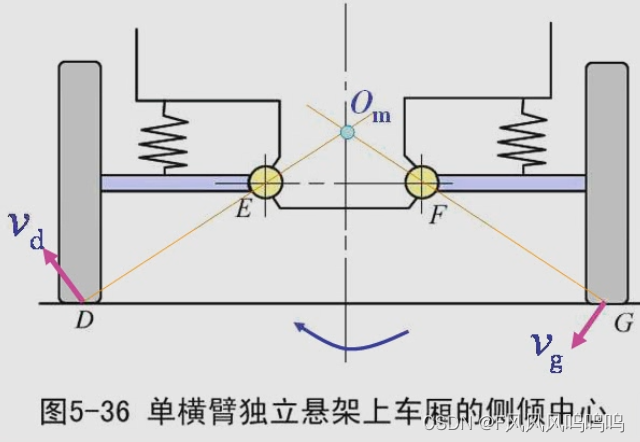
1)侧倾轴线:车厢相对于地面转动时的瞬时轴线
2)侧倾中心:侧倾轴线通过前、后轴处横断面上的瞬时转动中心;其位置由悬架导向机构决定,常用图解法确定
侧倾轴线是侧倾中心的连线
思考:先确定侧倾轴线再确定侧倾中心,还是先确定侧倾中心再确定侧倾轴线?
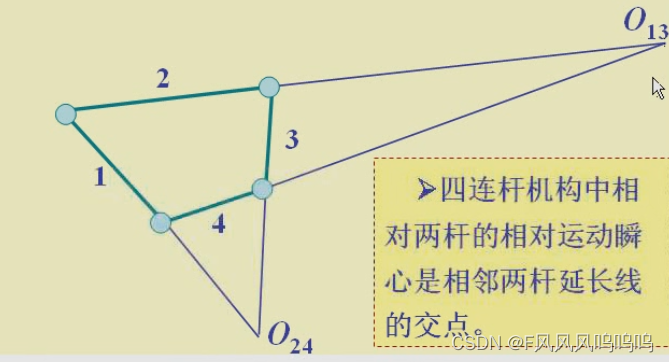
确定侧倾中心时:假定车厢不动,地面和车轮相对车厢转动2假定车轮与地面间无相对滑动;3对四连杆机构会用到三心定理
1) 单横臂独立悬架车厢的侧倾中心
2) 双横臂独立悬架车厢的侧倾中心

2.悬架的侧倾角刚度

1) 悬架的线刚度
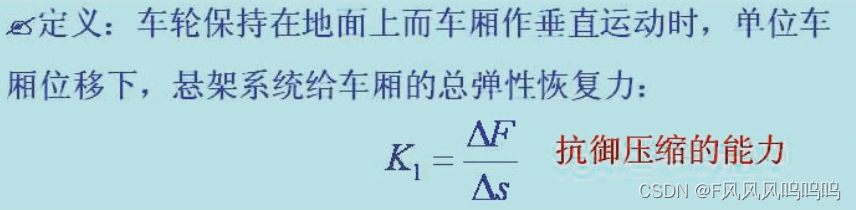
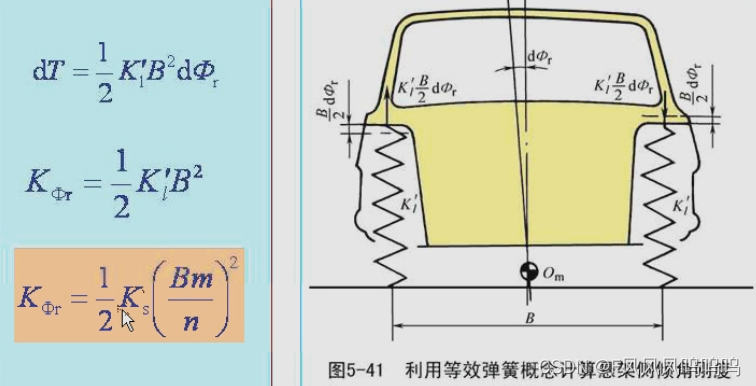


侧倾力矩取决于车辆结构和行驶工况,而侧倾角刚度则完全取决于车辆结构。
侧倾问题的求解思路:由车辆结构参数 (主要是悬架系统的型式、尺寸和弹性特性)确定侧倾角刚度;由车辆运动形态(侧向加速度) 和结构参数(主要是总体尺寸和质量分布) 确定侧倾力矩:二者相除,得到侧倾角。
侧倾角反应曲线运动时车厢相对地面的倾斜程度会改变车轮的外倾角,同时引起左右侧车轮垂直载荷的重新分配,可以进一步分析汽车的操纵稳定性
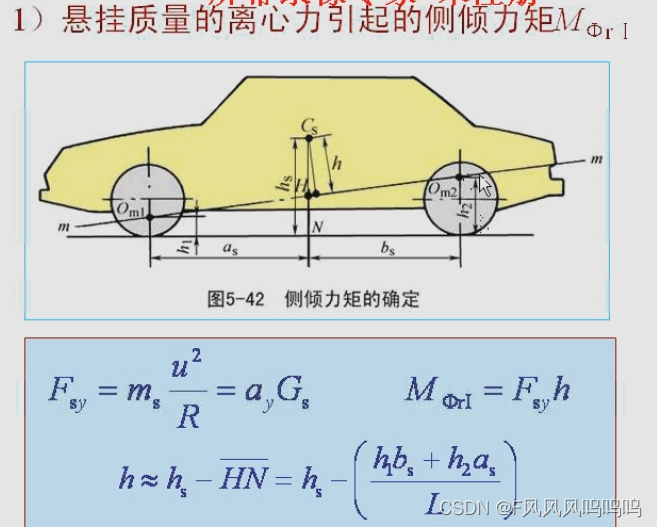
二、侧倾时垂直载荷在左右轮上的重新分配及其对稳态响应的影响
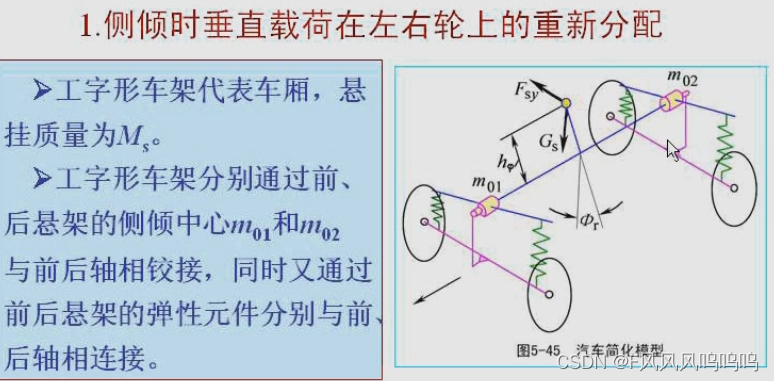

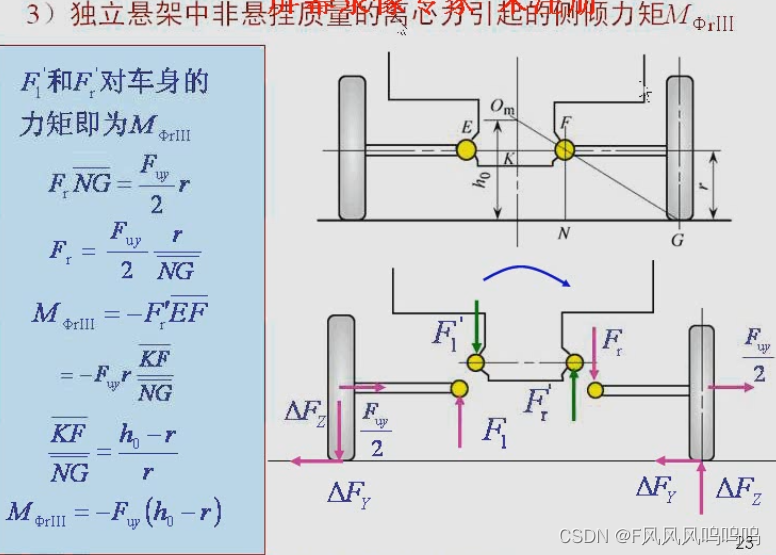
侧倾力矩计算包括:悬挂质量、非悬挂重力、非悬挂质量离心力
对于前后悬架而言,变形量(侧倾角) 是相同的,而侧倾刚度不同。
那么一定有:侧倾刚度大的悬架 (车轴) 分担的侧倾力矩大侧倾刚度小的悬架(车轴) 分担的侧倾力矩小。
侧倾力矩是针对悬架而言的,对于车轮则意味着两侧的垂直载荷发生变化,即“重新分配”

为增加汽车的不足转向量,应该使得前轮的侧偏角增加得比后轮的多;也就是使前轮的平均侧偏刚度下降得比后轮的多;也就是要求前轴左右车轮垂直载荷的变动量一再分配一大于后轮的。
当横向稳定杆布置在前轴时,可以提高前悬架的侧倾角刚度;侧倾时,前后轴侧倾角相同,而前悬架侧倾角刚度较大,所以可以分担更多的侧倾力矩,其左右车轮垂直载荷的变动量就更大;所以有利于增加不足转向量。

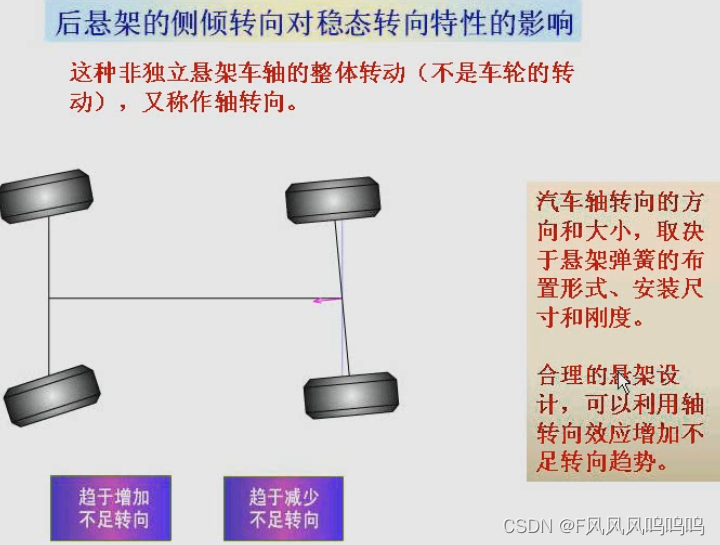
四、侧倾转向
车厢侧倾所引起的前转向轮绕主销的转动、后轮绕垂直于地面轴线的转动,即车轮转角的变动,称为侧倾转向
注意,此处的“转向角”,是将车轮看做刚体发生的刚性转动。不属于轮胎的弹性侧偏,而是对弹性侧偏的一种补充。

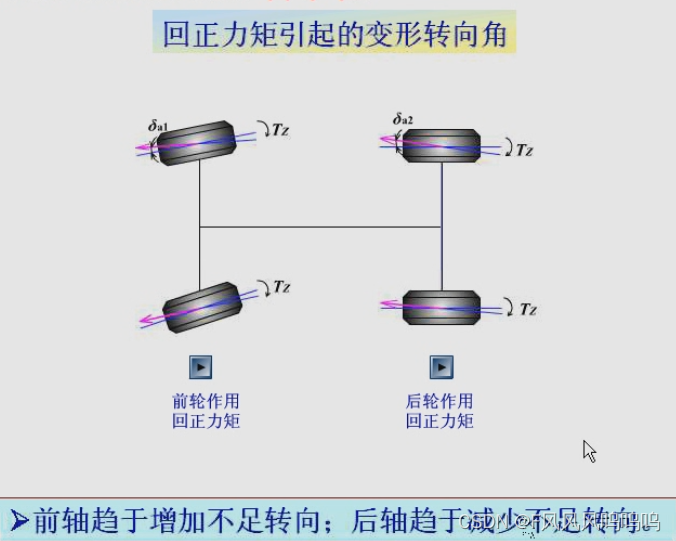
五、变形转向一悬架导向装置变形引起的 车轮转向角

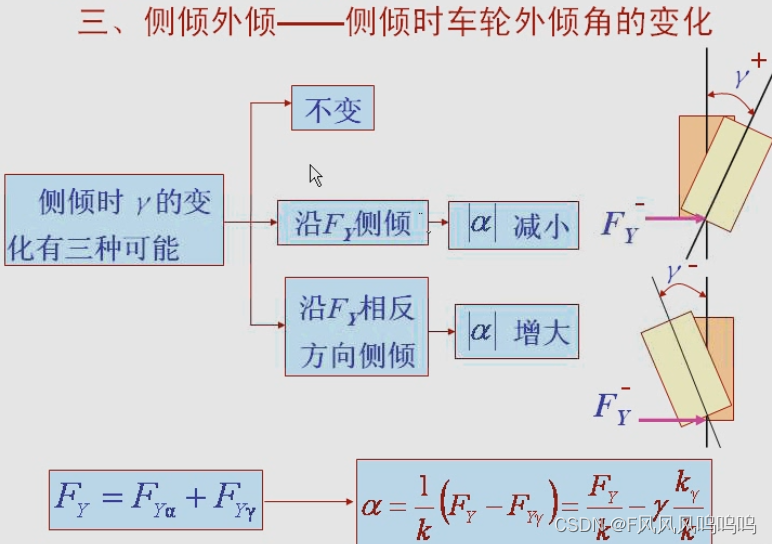
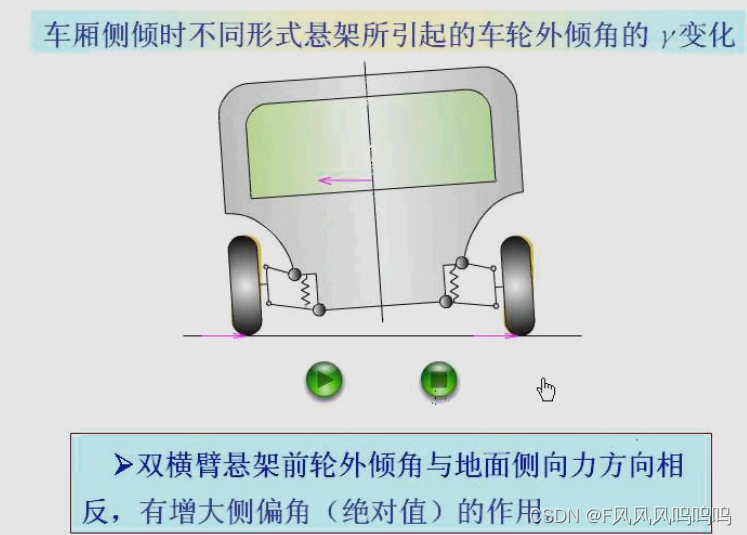
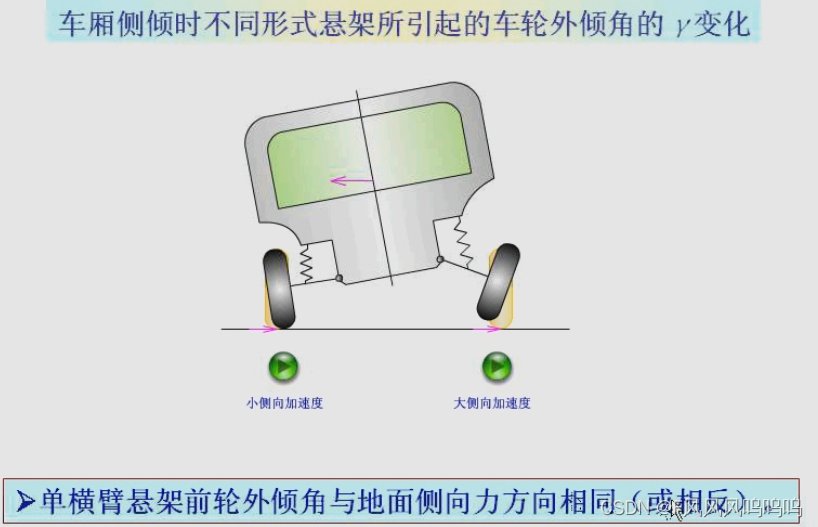
六、变形外倾一悬架导向装置变形引起的外倾角的变化

第五节 汽车操纵稳定性与转向系的关系
一、转向系的功能与转向盘力特性
1、转向系的功能
1)驾驶者通过转向盘控制前轮绕主销的转角,从而操纵汽车的运动方向。
2)凭借转向盘的反作用力, 将整车及轮胎的运动、受力状况反馈给驾驶者,以获得“路感”3)转向盘的输入有两种方式: 角输入和力输入。
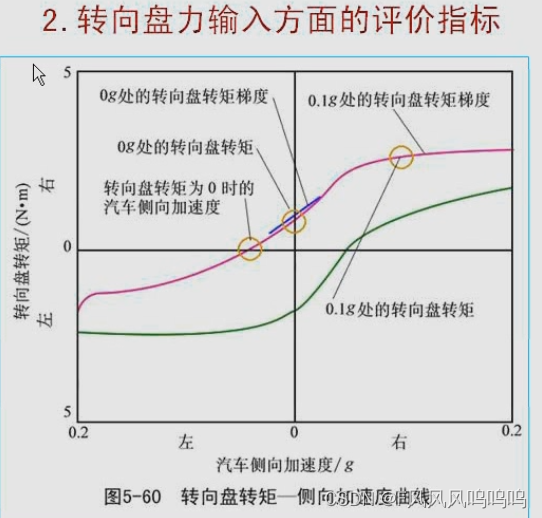
2.转向盘力特性

3.转向盘力特性的影响因素
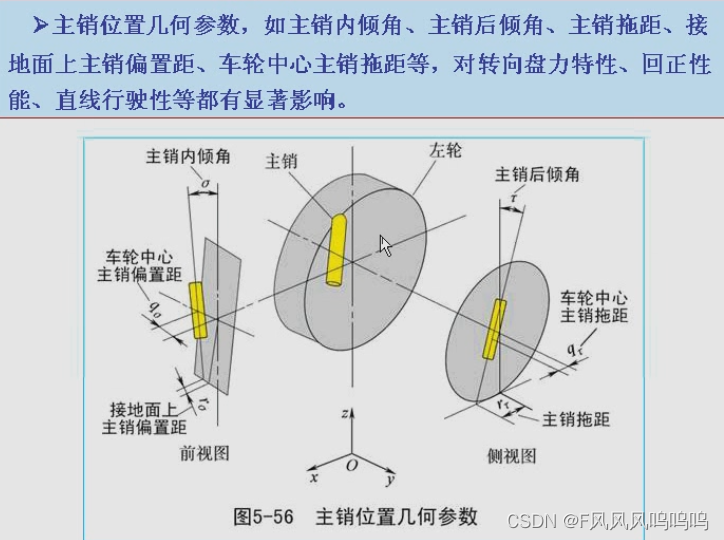
转向盘力特性决定于下列因素:转向器角传动比及其变化规律、转向器效率、动力转向器的转向盘操作力特性、转向杆系传动比、袋向杆系效率、由悬架导向杆系决定的主销位置、轮胎上的载荷、轮胎气压、轮胎力学特性、地面附着条件、转向盘转动惯量、转向柱摩擦阻力以及汽车整体动力学特性等
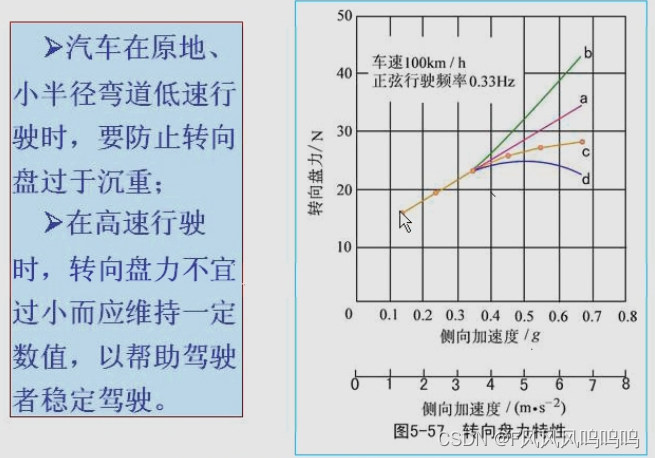
二、不同工况下对操纵稳定性的要求
三、评价高速公路行驶操纵稳定性的试验转向盘中间位置操纵稳定性试验(On CenterHandling Test)
汽车在高速公路上高速行驶时,具有以力输入为主和转向盘 (反作用)力是重要信息源的特点
四、转向系与汽车横摆角速度稳态响应的关系
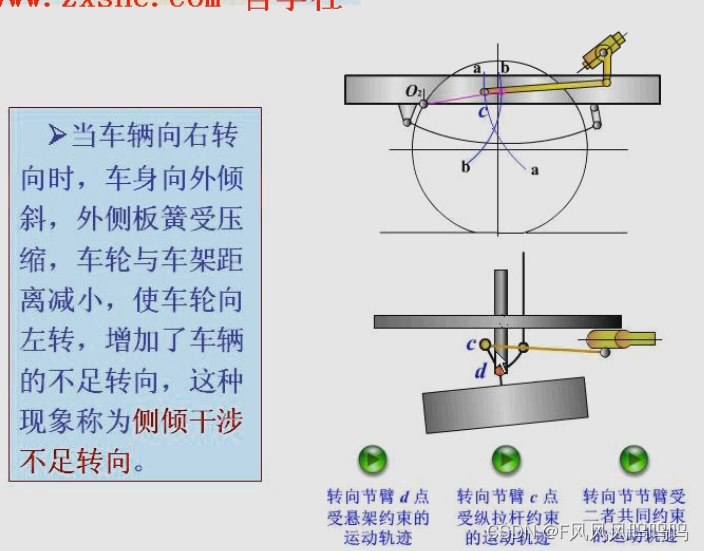
1.侧倾时转向系统与悬架的运动干涉
车厢侧倾时,如果非独立悬架汽车的转向系与悬架在运动学上关系不协调,将引起转向车轮干涉转向的现象。
2.转向系刚度与转向车轮的变形转向
- 在转向盘至转向车轮之间,包括转向器、转向杆系与转句器固定处在内的刚度,称为转向系 (角)刚度
- 转向系刚度低,前转向轮的变形转向角大,增加了汽车为不足转向趋势。
- 转向系刚度高,高速行驶时的“路感”较好。
第六节 汽车操纵稳定性与传动系的关系
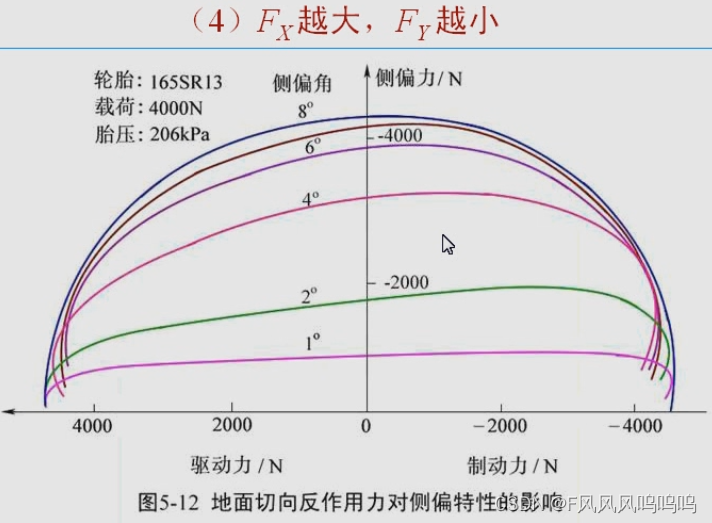
本节将介绍地面切向反作用力对汽车稳态转向特性的影响,还将介绍利用地面切向反作用力控制转向特性的方法和原理
一、地面切向反作用力与“不足一过多转向特性”的关系
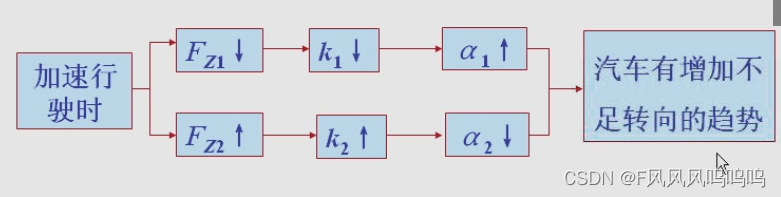
1)汽车在弯道上以大驱动力加速行驶
适度增加不足转向是好的
4)随着驱动力的增加,轮胎回正力矩通常也有所增加,这也增加了前轮驱动汽车的不足转向趋势


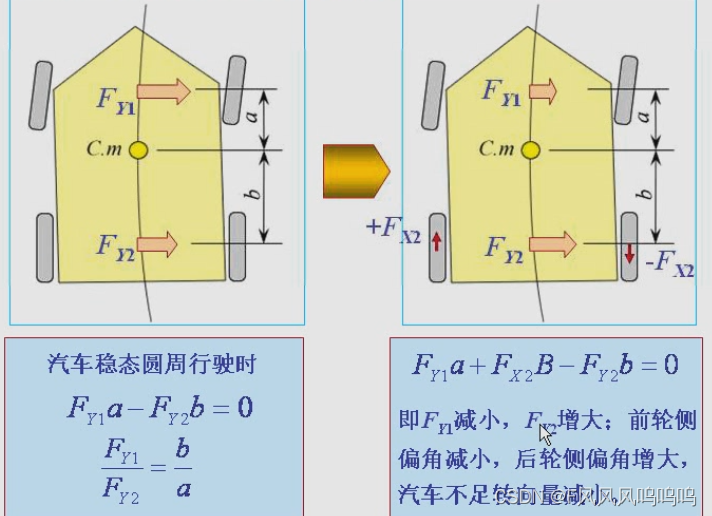
二、地面切向反作用力控制转向特性的基本概念简介

2.切向力控制方法
1)总切向反作用力控制:ABS就是总制动力控制,保证较佳的滑动率,提高制动时汽车的方向稳定性;TCS 是总驱动力控制,防止出现过大的滑转率提高驱动时汽车的方向稳定性
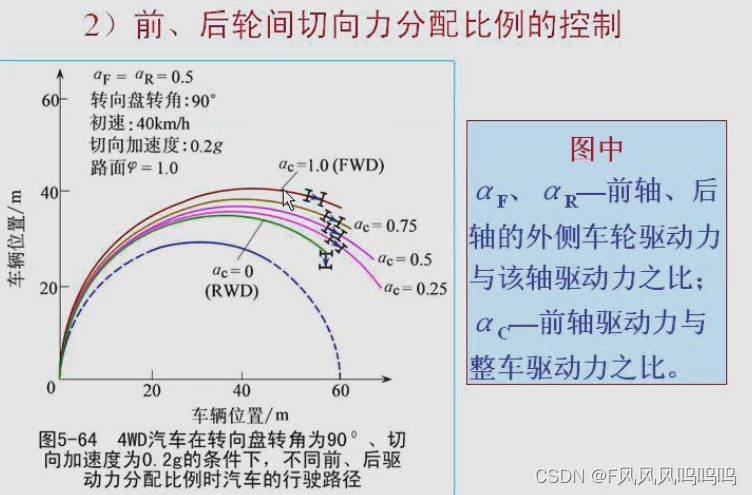
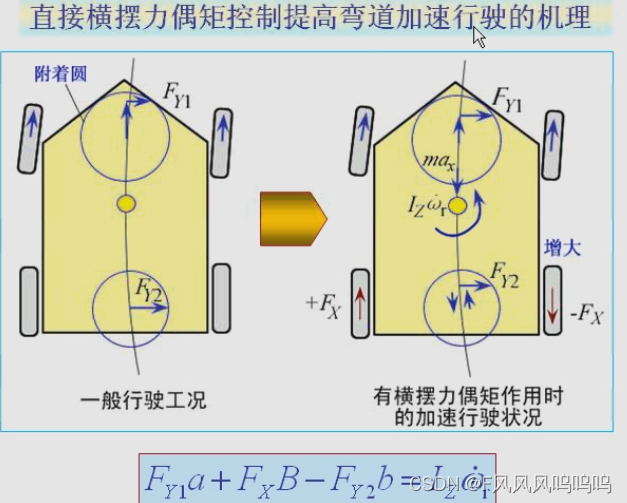
3) 内、外侧车轮间切向力分配的控制:由于改变内、外侧驱动力分配的比例,与在装有普通差速器的汽车上再施加一定数值的横摆力偶矩是一样的,这种驱动力的控制方式也常称为横摆力偶矩控制

第七节 提高操纵稳定性的电子控制系统
防抱死制动系统 (ABS) 与驱动力控制系统 (TCS)都是提高汽车操纵稳定性的电子控制系统
目前有更多的电子控制系统能显著改善汽车的操纵稳定性。
(涉及较多动力学基础和电子控制理论,不做深入要求)

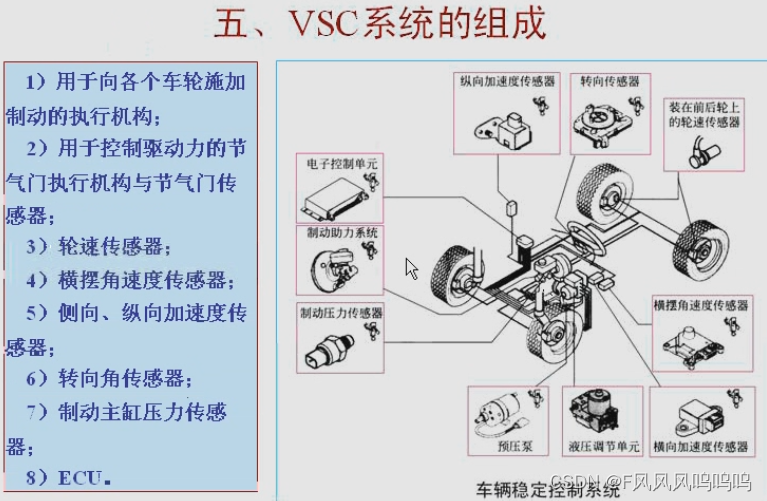
2.车辆稳定性控制系统(VSC或称ESP)
系统是以ABS为基础发展而成的
基本工作原理是:在大侧向加速度、大侧偏角的极限工况下,利用左右两侧制动力之差产生的横摆力偶矩来防止出现难以控制的侧滑现象。
当前轮侧滑时:
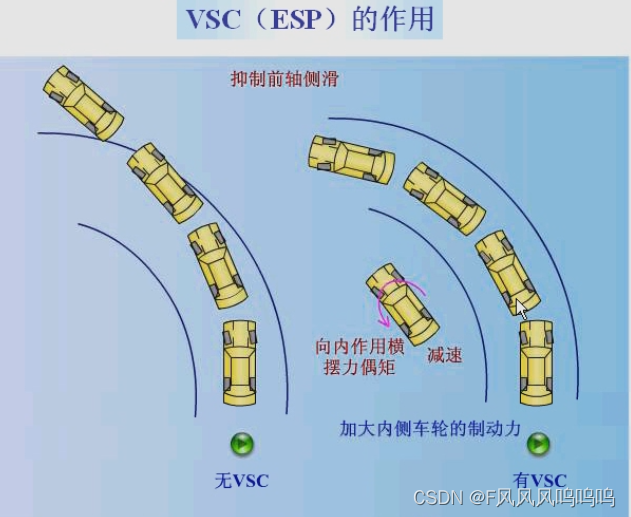
当后轮侧滑时:



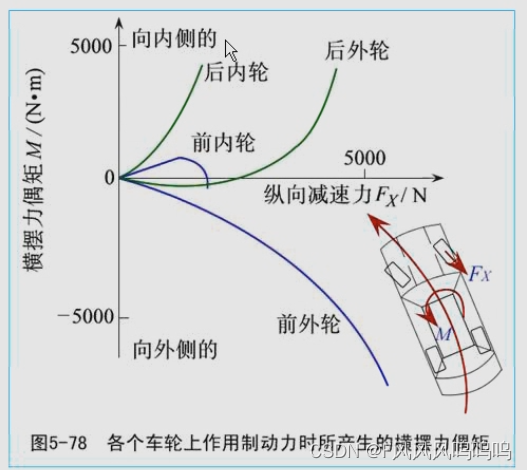
二、横摆力偶矩及制动力的控制效果
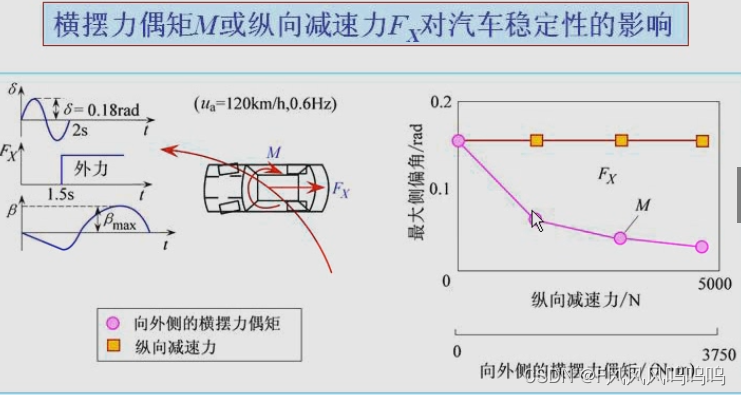
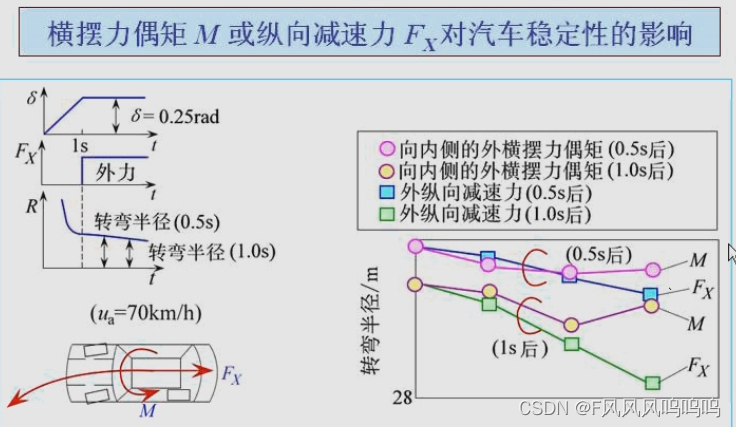
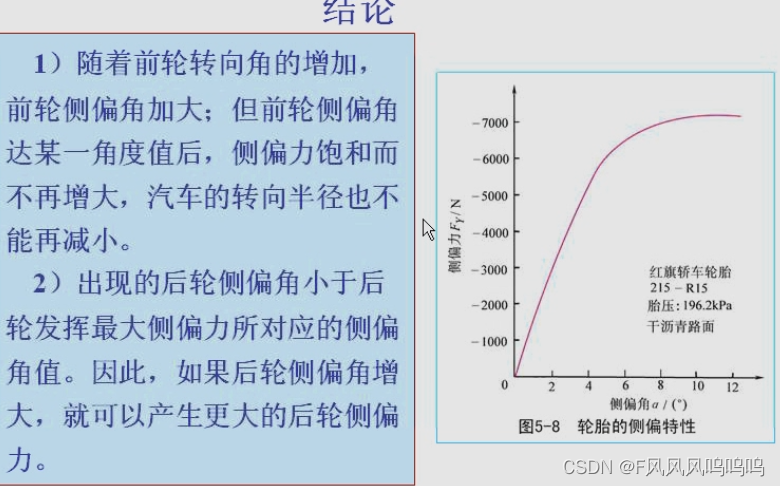
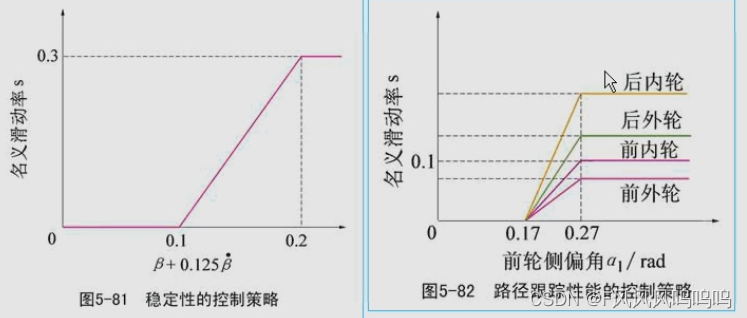
结论
1)为了保持汽车的稳定性,当后轴要侧滑发生激转时,应对汽车施加外侧的横摆力偶矩2)当前轴要侧滑而使汽车驶离弯道时,应对汽车施加适当大小向内侧的横摆力偶矩,使后轮的侧偏角达到最大侧偏力的角度
3)还应对汽车施加纵向减速力
三、各个车轮制动力控制的效果

四、四个车轮主动制动的控制效果

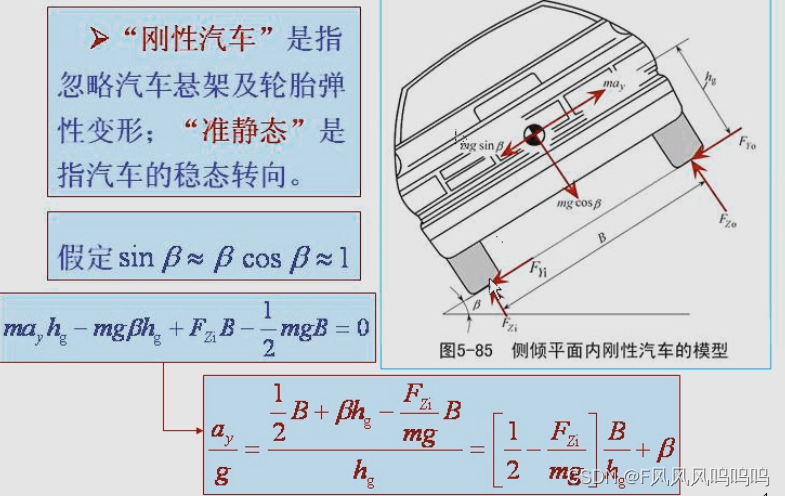
第八节 汽车的侧翻
汽车侧翻是指汽车在行驶过程中绕其纵轴线转动90°或更大的角度,以至车身与地面相接触的一种极其危险的侧向运动

一、刚性汽车的准静态侧翻




本章要点
- 汽车操纵稳定性的概念及研究范围(评价)
- 车辆坐标系与轮胎坐标系
- 线性二自由度汽车模型的建立和微分方程
- 稳态横摆角速度增益和稳定性因数
- 稳态响应的表征
- 瞬态响应的品质和收敛(稳定) 条件
- 侧倾问题 (操稳性与悬架的关系)
- 操稳性与转向系和传动系的关系、电子稳定控制系统
- 侧翻问题
智能推荐
spark DataFrame 保存成csv 使用execl打开乱码解决方法_spark excel 中文-程序员宅基地
文章浏览阅读4k次,点赞3次,收藏12次。工作中需要通过Spark以csv格式输出spark计算结果包括一些指标和维度为了方便普通客户使用表头要求中文。中文识别上遇到了些问题,出现了乱码:解决csv文件中的乱码最直接的思路就是添加BOM,这样Excel在打开Excel的时候就知道使用什么样的编码来解析这篇文档了。方法如下 只需要在csv文件表头字段名称的第一个字段名称的字符串最前面拼接一个BOM字符串就可以了..._spark excel 中文
1024,程序员节_1024程序代码-程序员宅基地
文章浏览阅读1.3w次,点赞23次,收藏11次。1024程序员节是中国广大程序员的共同节日。1024是2的十次方,二进制计数的基本计量单位之一。程序员(英文Programmer)是从事前端、后端程序开发、系统运维、测试等的专业人员。程序员就像是一个个1024,以最低调、踏实、核心的功能模块搭建起这个科技世界。1G=1024M,而1G与1级谐音,也有一级棒的意思。以下表情包,博君一笑程序员的高级自黑每当想放松的时..._1024程序代码
脱贫帮扶绩效评价-2020年华数杯C题(含python代码)-程序员宅基地
文章浏览阅读1.1w次,点赞33次,收藏20次。支持博主,请关注公众号个人公众号 第一问就是个相关性分析。具体而言,就是计算2015年和2020年各个指标的相关性。例如:2015年和2020年的SR这个指标的相关性是多少,计算方式用皮尔森方法即可。下面是代码```python# -*- coding: utf-8 -*-import pandas as pdimport matplotlib.pyplot as plt# 原始数据的问_2020年华数杯c题
项目管理 之六 详解 Gitlab 本地部署全过程、Gitlab Pages、企业版 PATCH_gitlab本地部署-程序员宅基地
文章浏览阅读4.7k次,点赞7次,收藏19次。Gitlab 官方推荐用户安装企业版,因为在不购买许可证时,安装的 Gitlab-ee 就是运行为 Gitlab-ce 版本(付费功能自动隐藏)_gitlab本地部署
BGP13种选路原则_bgp选路原则-程序员宅基地
文章浏览阅读581次,点赞5次,收藏6次。可以看到,原来优选了对等体2.2.2.2的路由现在下一跳地址变为了10.1.12.1,因为路由器会将从EBGP学习到的路由信息原封不动的发送给其他对等体,而peer 3.3.3.3 next-hop-local这条命令就是告诉其他对等体,我发给你们的路由,下一跳来找我。但是,在比较该条规则下,还有一个潜在的规则:如果路由中携带有Originator_ID,则先比较Originator_ID,再比较Router_ID,同样,具有最小的Originator_ID值的路由为最优。_bgp选路原则
RDLC报表设计与打印相关备忘_打卡rdlc报表设计-程序员宅基地
文章浏览阅读152次。而在使用打印机打印时需要调用ReportPresenter.PrintRdlc(...)方法的PrinterInfo参数的landscape属性设置为true,如下图。1、RDLC报表设计在最新VSTS集成环境(IDE),如VS2019及以上,不能打开Designer(设计器);3、设计界面显示标尺,以便直观看到报表的宽度(如下报表宽度27cm+,所以该表设计是横向A4纸张页面布局的)4、基于第3点的原因,导出报表时正常使用即可,但是打印时需要将布局改为纵向。_打卡rdlc报表设计
随便推点
mysql时间索引和格式探讨_mysql 时间索引-程序员宅基地
文章浏览阅读5.3k次,点赞6次,收藏7次。mysql几种时间和索引探讨_mysql 时间索引
2023年东南大学网络空间安全学院保研夏令营面试经验贴_东南大学网安院夏令营-程序员宅基地
文章浏览阅读792次。分享东南网安的保研经验和给出一些建议_东南大学网安院夏令营
python解多元一次方程组_多元一次线性方程组的解法 代码-程序员宅基地
文章浏览阅读7.3k次,点赞2次,收藏22次。1.python解多元一次方程组import numpy as np#多元线性方程组# x-2y+3z=-10# 2x+3y+4z=5# 3x+5y+7z=7A=np.array([[1,-2,3],[2,3,4],[3,5,7]])b=np.array([-10,5,7])x=np.linalg.solve(A,b)print('三元一次方程组的解:\n',x)结果如下:2...._多元一次线性方程组的解法 代码
【材料计算】第一性原理、密度泛函理论、从头算之间的关系_密度泛函理论和第一性原理的关系-程序员宅基地
文章浏览阅读1.9w次,点赞15次,收藏44次。首先,第一原理是firstprinciple,不是从头算(ab initio),不是DFT。分子模拟有两个层面的东西要讨论,就是当使用了BO近似后,怎么分别处理电子和离子实。处理电子:当用量子力学处理电子的时候就是第一原理方法,密度泛函是一种、半经验也是、HF也是,等等。当我们不想管电子的细节的时候,就直接用势函数描述电子的效果,就是分子力学的方法。而第一原理中的HF系列是不用任何实验拟和结..._密度泛函理论和第一性原理的关系
Linux服务器安装ArangoDB数据库:_arangodb 卸载-程序员宅基地
文章浏览阅读2.6k次。系统环境:(CentOS Linux release 7.2.1511 (Core))uname -a下载rpm安装包 安装rpm安装包命令:rpm -i arangodb3e-3.2.8-1.x86_64.rpm 安装完成之后查询ArangoDB状态sudo systemctl status arangodb3运行结果:ArangoDB在Teminal访问数据命令arangosh运行_arangodb 卸载
使用springboot、vue框架和element ui组件 搭建前后端分离项目_利用idea创建 spring boot vue element 前后端分离 新项目-程序员宅基地
文章浏览阅读599次。使用springboot、vue框架和element ui组件 搭建前后端分基础离项目_利用idea创建 spring boot vue element 前后端分离 新项目