STM32CubeMX ULN2003步进电机驱动_stm32 步进电机-程序员宅基地
一、28BYJ-48 步进电机
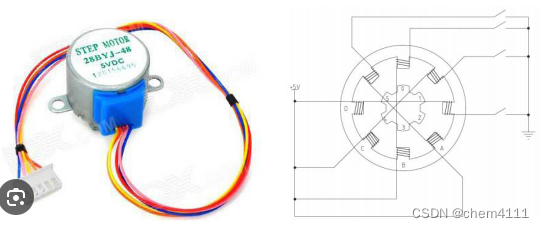
28BYJ-48是一款5线单极步进电机,运行电压为5V。
根据数据表,当28BYJ-48电机在全步模式下运行时,每步对应于11.25°的旋转。这意味着每转有32步 (360°/11.25° = 32)。


如上图所示,步距角=5.625°/64
意思就是每64个脉冲步进电机就会转5.625度,因此我们很容易得出以下计算公式:
电机转一圈有360°,那么转一圈的脉冲数 = 360 / 5.625 * 64 = 4096 个脉冲。
进而很容易得到以下角度与脉冲的转换:
/*
Rotation_Angle:旋转角度
返回:Motor_Pulse 根据公式计算得出的脉冲个数
*/
int Motor_Angle_Cal(int Rotation_Angle)
{
Motor_Pulse = (int)((double)(Rotation_Angle / 5.625) * 64) ;
return Motor_Pulse ;
}二、CubeMX配置
sys

rcc
 时钟树
时钟树

gpio

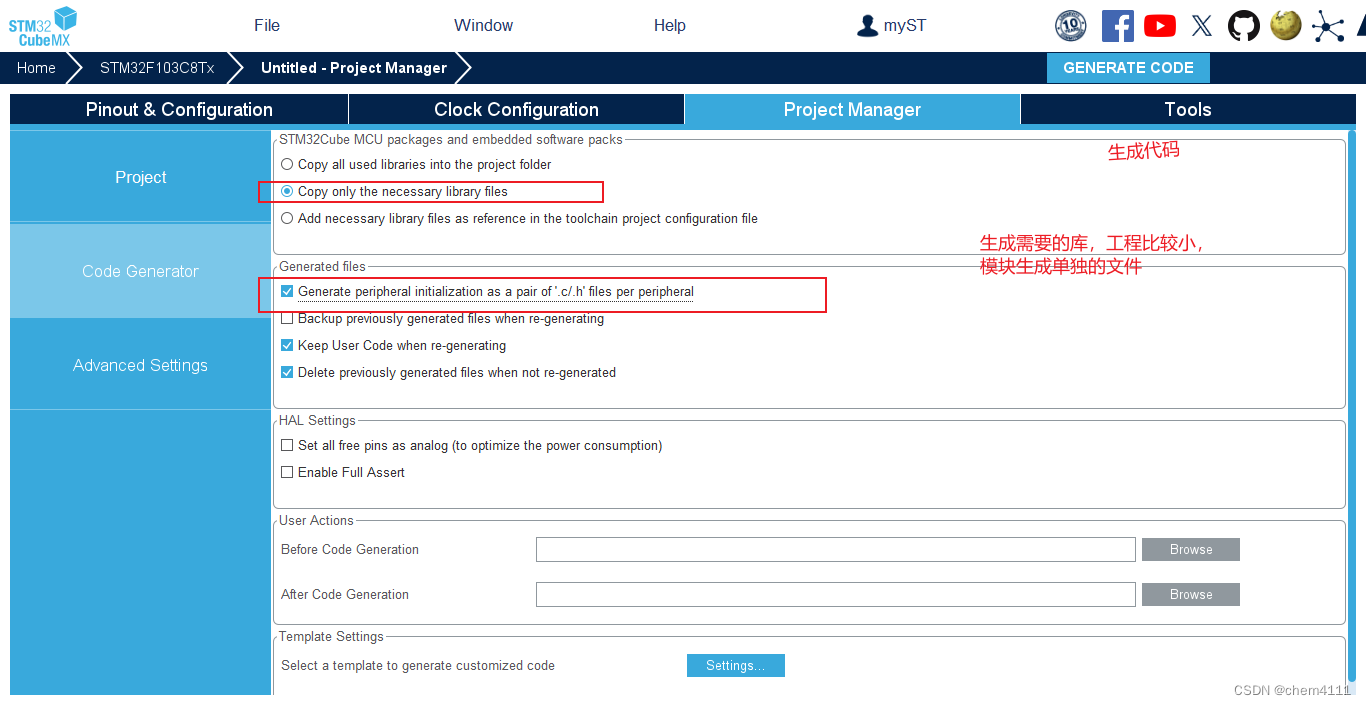
生成工程

三、代码
Motor.h
#ifndef __MOTOR_H
#define __MOTOR_H
#include "main.h"
//4相控制定义
#define MOTOR_A_ON HAL_GPIO_WritePin(GPIOB, GPIO_PIN_3, GPIO_PIN_SET);
#define MOTOR_A_OFF HAL_GPIO_WritePin(GPIOB, GPIO_PIN_3, GPIO_PIN_RESET);
#define MOTOR_B_ON HAL_GPIO_WritePin(GPIOB, GPIO_PIN_4, GPIO_PIN_SET);
#define MOTOR_B_OFF HAL_GPIO_WritePin(GPIOB, GPIO_PIN_4, GPIO_PIN_RESET);
#define MOTOR_C_ON HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, GPIO_PIN_SET);
#define MOTOR_C_OFF HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, GPIO_PIN_RESET);
#define MOTOR_D_ON HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);
#define MOTOR_D_OFF HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);
extern int direction ;
extern uint16_t Motor_Pulse ;
//电机脉冲计算
int Motor_Angle_Cal(int Rotation_Angle);
//电机8节拍控制
void MOTOR_CONTROLD(uint8_t step, uint8_t direction);
//关闭电机
void CLOSE_MOTOR(void);
#endif //__MOTOR_H
Motor.c
#include "Motor.h"
//电机旋转的方向
int direction = 0 ;
//电机旋转的脉冲个数
uint16_t Motor_Pulse = 0 ;
//电机控制,采用8节拍来做
//A->AB->B->BC->C->CD->D->DA
void MOTOR_CONTROLD(uint8_t step, uint8_t direction)
{
uint8_t __step = step ;
//判断电机的旋转方向,如果为1,则逆向旋转
if(1 == direction)
__step = 8 - step ;
switch(__step)
{
//A
case 0:
MOTOR_A_ON;
MOTOR_B_OFF;
MOTOR_C_OFF;
MOTOR_D_OFF;
break ;
//AB
case 1:
MOTOR_A_ON;
MOTOR_B_ON;
MOTOR_C_OFF;
MOTOR_D_OFF;
break ;
//B
case 2:
MOTOR_A_OFF;
MOTOR_B_ON;
MOTOR_C_OFF;
MOTOR_D_OFF;
break ;
//BC
case 3:
MOTOR_A_OFF;
MOTOR_B_ON;
MOTOR_C_ON;
MOTOR_D_OFF;
break ;
//C
case 4:
MOTOR_A_OFF;
MOTOR_B_OFF;
MOTOR_C_ON;
MOTOR_D_OFF;
break ;
//CD
case 5:
MOTOR_A_OFF;
MOTOR_B_OFF;
MOTOR_C_ON;
MOTOR_D_ON;
break ;
//D
case 6:
MOTOR_A_OFF;
MOTOR_B_OFF;
MOTOR_C_OFF;
MOTOR_D_ON;
//DA
case 7:
MOTOR_A_ON;
MOTOR_B_OFF;
MOTOR_C_OFF;
MOTOR_D_ON;
break ;
}
}
//关闭电机
void CLOSE_MOTOR(void)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_3 | GPIO_PIN_4 | GPIO_PIN_5 | GPIO_PIN_6, GPIO_PIN_RESET);
}
/*
Rotation_Angle:旋转角度
返回:Motor_Pulse 根据公式计算得出的脉冲个数
*/
int Motor_Angle_Cal(int Rotation_Angle)
{
Motor_Pulse = (int)((double)(Rotation_Angle / 5.625) * 64) ;
return Motor_Pulse ;
}
main.c
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "Motor.h"
/* USER CODE END Includes */while
步进电机简单正反转
/* USER CODE BEGIN WHILE */
while (1)
{
//1反向 0正向
direction = 1;
for(uint8_t step=0;step<=8;step++){
//控制步进电机旋转
MOTOR_CONTROLD(step, direction);
HAL_Delay(1);
}
/* USER CODE END WHILE */效果
step_motor
链接: https://pan.baidu.com/s/1iucYeZGygwHi3DYeds4gqA?pwd=qabt 提取码: qabt
智能推荐
class和struct的区别-程序员宅基地
文章浏览阅读101次。4.class可以有⽆参的构造函数,struct不可以,必须是有参的构造函数,⽽且在有参的构造函数必须初始。2.Struct适⽤于作为经常使⽤的⼀些数据组合成的新类型,表示诸如点、矩形等主要⽤来存储数据的轻量。1.Class⽐较适合⼤的和复杂的数据,表现抽象和多级别的对象层次时。2.class允许继承、被继承,struct不允许,只能继承接⼝。3.Struct有性能优势,Class有⾯向对象的扩展优势。3.class可以初始化变量,struct不可以。1.class是引⽤类型,struct是值类型。
android使用json后闪退,应用闪退问题:从json信息的解析开始就会闪退-程序员宅基地
文章浏览阅读586次。想实现的功能是点击顶部按钮之后按关键字进行搜索,已经可以从服务器收到反馈的json信息,但从json信息的解析开始就会闪退,加载listview也不知道行不行public abstract class loadlistview{public ListView plv;public String js;public int listlength;public int listvisit;public..._rton转json为什么会闪退
如何使用wordnet词典,得到英文句子的同义句_get_synonyms wordnet-程序员宅基地
文章浏览阅读219次。如何使用wordnet词典,得到英文句子的同义句_get_synonyms wordnet
系统项目报表导出功能开发_积木报表 多线程-程序员宅基地
文章浏览阅读521次。系统项目报表导出 导出任务队列表 + 定时扫描 + 多线程_积木报表 多线程
ajax 如何从服务器上获取数据?_ajax 获取http数据-程序员宅基地
文章浏览阅读1.1k次,点赞9次,收藏9次。使用AJAX技术的好处之一是它能够提供更好的用户体验,因为它允许在不重新加载整个页面的情况下更新网页的某一部分。另外,AJAX还使得开发人员能够创建更复杂、更动态的Web应用程序,因为它们可以在后台与服务器进行通信,而不需要打断用户的浏览体验。在Web开发中,AJAX(Asynchronous JavaScript and XML)是一种常用的技术,用于在不重新加载整个页面的情况下,从服务器获取数据并更新网页的某一部分。使用AJAX,你可以创建异步请求,从而提供更快的响应和更好的用户体验。_ajax 获取http数据
Linux图形终端与字符终端-程序员宅基地
文章浏览阅读2.8k次。登录退出、修改密码、关机重启_字符终端
随便推点
Python与Arduino绘制超声波雷达扫描_超声波扫描建模 python库-程序员宅基地
文章浏览阅读3.8k次,点赞3次,收藏51次。前段时间看到一位发烧友制作的超声波雷达扫描神器,用到了Arduino和Processing,可惜啊,我不会Processing更看不懂人家的程序,咋办呢?嘿嘿,所以我就换了个思路解决,因为我会一点Python啊,那就动手吧!在做这个案例之前先要搞明白一个问题:怎么将Arduino通过超声波检测到的距离反馈到Python端?这个嘛,我首先想到了串行通信接口。没错!就是串口。只要Arduino将数据发送给COM口,然后Python能从COM口读取到这个数据就可以啦!我先写了一个测试程序试了一下,OK!搞定_超声波扫描建模 python库
凯撒加密方法介绍及实例说明-程序员宅基地
文章浏览阅读4.2k次。端—端加密指信息由发送端自动加密,并且由TCP/IP进行数据包封装,然后作为不可阅读和不可识别的数据穿过互联网,当这些信息到达目的地,将被自动重组、解密,而成为可读的数据。不可逆加密算法的特征是加密过程中不需要使用密钥,输入明文后由系统直接经过加密算法处理成密文,这种加密后的数据是无法被解密的,只有重新输入明文,并再次经过同样不可逆的加密算法处理,得到相同的加密密文并被系统重新识别后,才能真正解密。2.使用时,加密者查找明文字母表中需要加密的消息中的每一个字母所在位置,并且写下密文字母表中对应的字母。_凯撒加密
工控协议--cip--协议解析基本记录_cip协议embedded_service_error-程序员宅基地
文章浏览阅读5.7k次。CIP报文解析常用到的几个字段:普通类型服务类型:[0x00], CIP对象:[0x02 Message Router], ioi segments:[XX]PCCC(带cmd和func)服务类型:[0x00], CIP对象:[0x02 Message Router], cmd:[0x101], fnc:[0x101]..._cip协议embedded_service_error
如何在vs2019及以后版本(如vs2022)上添加 添加ActiveX控件中的MFC类_vs添加mfc库-程序员宅基地
文章浏览阅读2.4k次,点赞9次,收藏13次。有时候我们在MFC项目开发过程中,需要用到一些微软已经提供的功能,如VC++使用EXCEL功能,这时候我们就能直接通过VS2019到如EXCEL.EXE方式,生成对应的OLE头文件,然后直接使用功能,那么,我们上篇文章中介绍了vs2017及以前的版本如何来添加。但由于微软某些方面考虑,这种方式已被放弃。从上图中可以看出,这一功能,在从vs2017版本15.9开始,后续版本已经删除了此功能。那么我们如果仍需要此功能,我们如何在新版本中添加呢。_vs添加mfc库
frame_size (1536) was not respected for a non-last frame_frame_size (1024) was not respected for a non-last-程序员宅基地
文章浏览阅读785次。用ac3编码,执行编码函数时报错入如下:[ac3 @ 0x7fed7800f200] frame_size (1536) was not respected for anon-last frame (avcodec_encode_audio2)用ac3编码时每次送入编码器的音频采样数应该是1536个采样,不然就会报上述错误。这个数字并非刻意固定,而是跟ac3内部的编码算法原理相关。全网找不到,国内音视频之路还有很长的路,音视频人一起加油吧~......_frame_size (1024) was not respected for a non-last frame
Android移动应用开发入门_在安卓移动应用开发中要在活动类文件中声迷你一个复选框变量-程序员宅基地
文章浏览阅读230次,点赞2次,收藏2次。创建Android应用程序一个项目里面可以有很多模块,而每一个模块就对应了一个应用程序。项目结构介绍_在安卓移动应用开发中要在活动类文件中声迷你一个复选框变量