Python基于OpenCV&YOLO台球击球路线规划系统(源码&部署教程)_桌球延长线源码-程序员宅基地
技术标签: python OpenCV 计算机视觉 目标检测 opencv
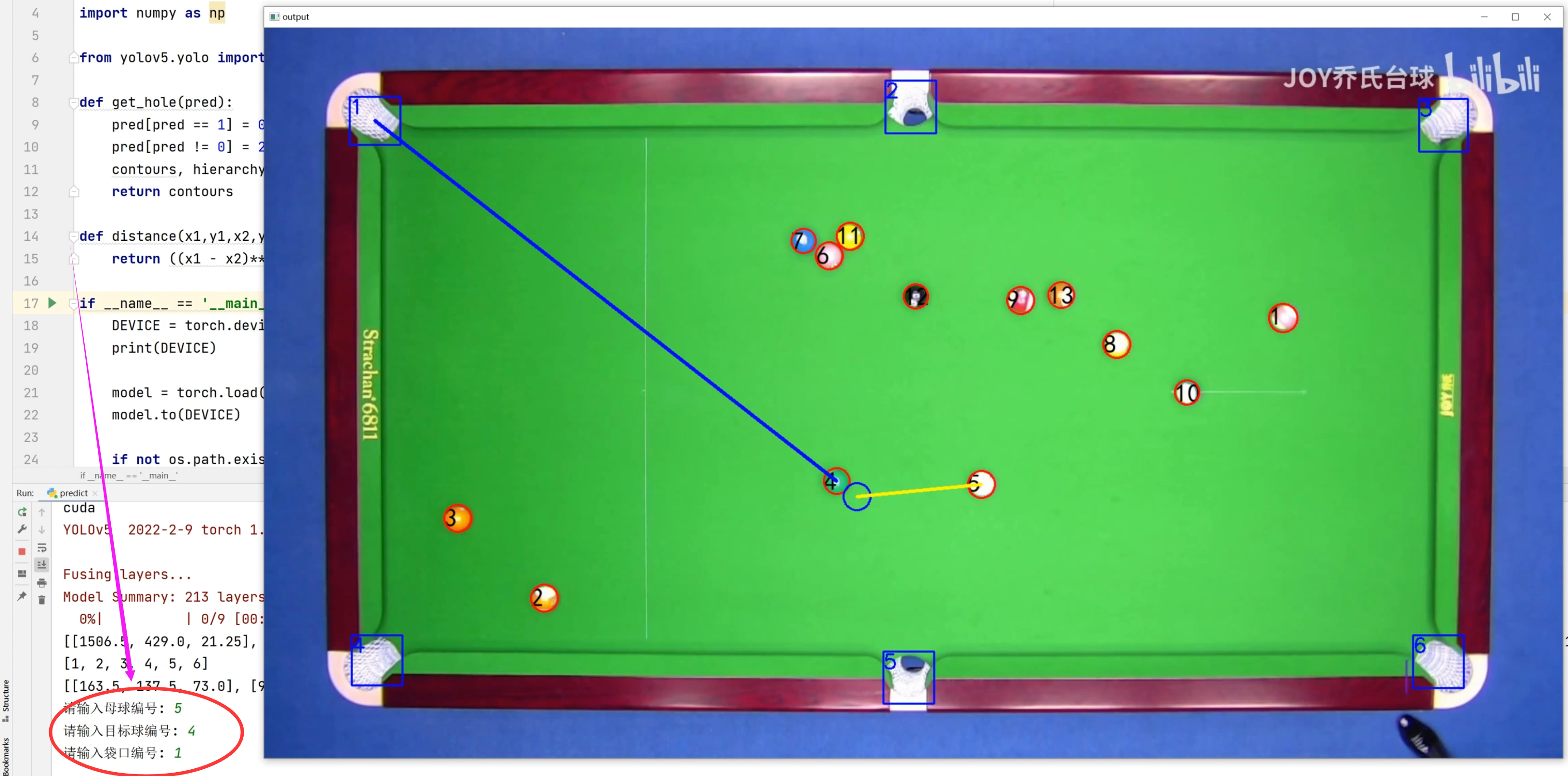
1.项目效果展示



2.视频演示
3.YOLOv7算法简介
YOLOv7 在 5 FPS 到 160 FPS 范围内,速度和精度都超过了所有已知的目标检测器
并在 GPU V100 上,30 FPS 的情况下达到实时目标检测器的最高精度 56.8% AP。YOLOv7 是在 MS COCO 数据集上从头开始训练的,不使用任何其他数据集或预训练权重。
相对于其他类型的工具,YOLOv7-E6 目标检测器(56 FPS V100,55.9% AP)比基于 transformer 的检测器 SWINL Cascade-Mask R-CNN(9.2 FPS A100,53.9% AP)速度上高出 509%,精度高出 2%,比基于卷积的检测器 ConvNeXt-XL Cascade-Mask R-CNN (8.6 FPS A100, 55.2% AP) 速度高出 551%,精度高出 0.7%。
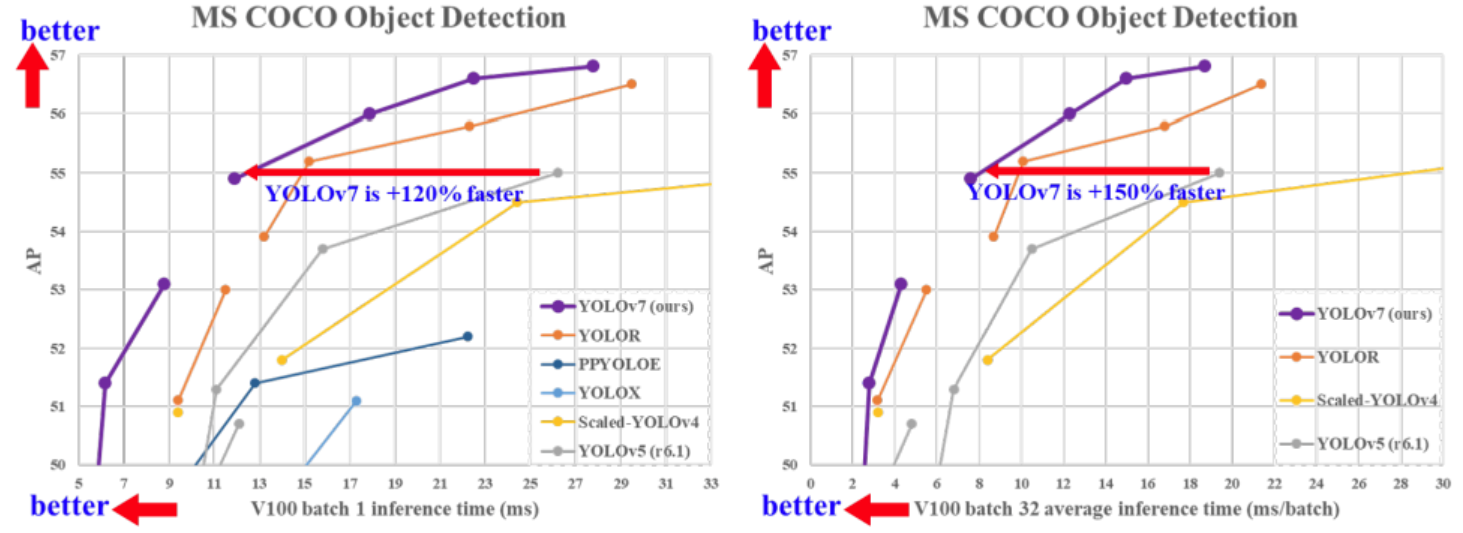
此外, YOLOv7 的在速度和精度上的表现也优于 YOLOR、YOLOX、Scaled-YOLOv4、YOLOv5、DETR 等多种目标检测器。
4.YOLOv7 技术方法
近年来,实时目标检测器仍在针对不同的边缘设备进行开发。例如,MCUNet 和 NanoDet 的开发专注于生产低功耗单芯片并提高边缘 CPU 的推理速度;YOLOX、YOLOR 等方法专注于提高各种 GPU 的推理速度;实时目标检测器的发展集中在高效架构的设计上;在 CPU 上使用的实时目标检测器的设计主要基于 MobileNet、ShuffleNet 或 GhostNet;为 GPU 开发的实时目标检测器则大多使用 ResNet、DarkNet 或 DLA,并使用 CSPNet 策略来优化架构。
YOLOv7 的发展方向与当前主流的实时目标检测器不同,研究团队希望它能够同时支持移动 GPU 和从边缘到云端的 GPU 设备。除了架构优化之外,该研究提出的方法还专注于训练过程的优化,将重点放在了一些优化模块和优化方法上。这可能会增加训练成本以提高目标检测的准确性,但不会增加推理成本。研究者将提出的模块和优化方法称为可训练的「bag-of-freebies」。
对于模型重参数化,该研究使用梯度传播路径的概念分析了适用于不同网络层的模型重参数化策略,并提出了有计划的重参数化模型。此外,研究者发现使用动态标签分配技术时,具有多个输出层的模型在训练时会产生新的问题:「如何为不同分支的输出分配动态目标?」针对这个问题,研究者提出了一种新的标签分配方法,称为从粗粒度到细粒度(coarse-to-fine)的引导式标签分配。
该研究的主要贡献包括:
(1) 设计了几种可训练的 bag-of-freebies 方法,使得实时目标检测可以在不增加推理成本的情况下大大提高检测精度;
(2) 对于目标检测方法的演进,研究者发现了两个新问题:一是重参数化的模块如何替换原始模块,二是动态标签分配策略如何处理分配给不同输出层的问题,并提出了解决这两个问题的方法;
(3) 提出了实时目标检测器的「扩充(extend)」和「复合扩展(compound scale)」方法,以有效地利用参数和计算;
(4) 该研究提出的方法可以有效减少 SOTA 实时目标检测器约 40% 的参数和 50% 的计算量,并具有更快的推理速度和更高的检测精度。
在大多数关于设计高效架构的文献中,人们主要考虑的因素包括参数的数量、计算量和计算密度。下图 2(b)中 CSPVoVNet 的设计是 VoVNet 的变体。CSPVoVNet 的架构分析了梯度路径,以使不同层的权重能够学习更多不同的特征,使推理更快、更准确。图 2 中的 ELAN 则考虑了「如何设计一个高效网络」的问题。
YOLOv7 研究团队提出了基于 ELAN 的扩展 E-ELAN,其主要架构如图所示。
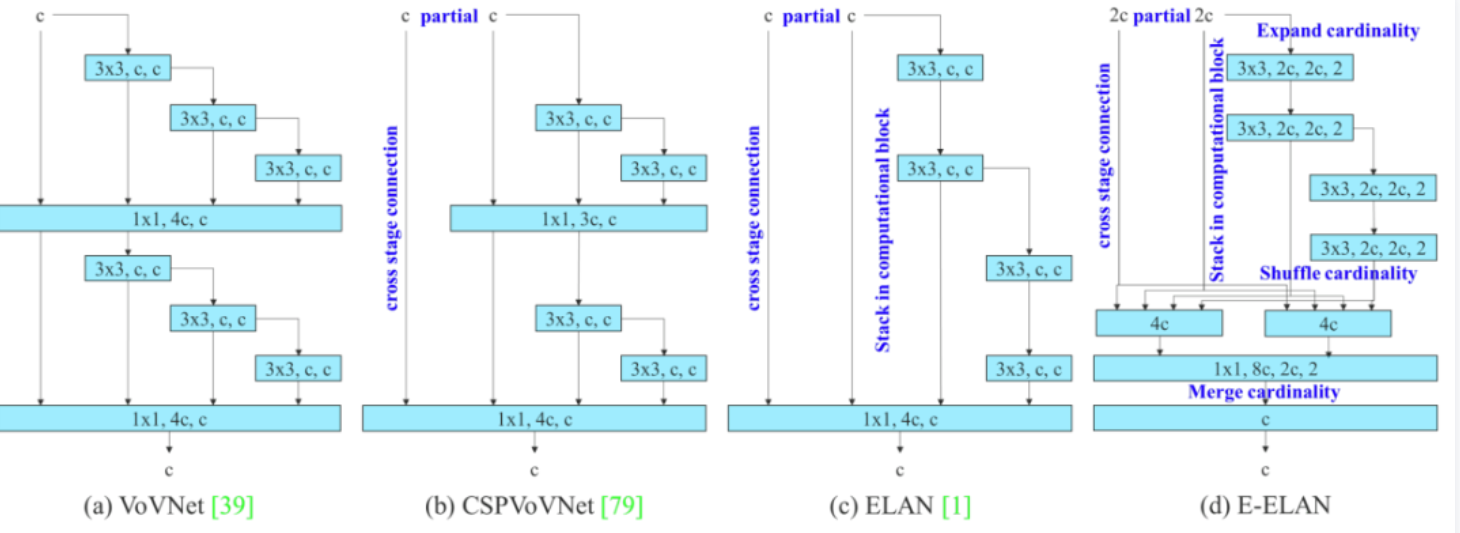
新的 E-ELAN 完全没有改变原有架构的梯度传输路径,其中使用组卷积来增加添加特征的基数(cardinality),并以 shuffle 和 merge cardinality 的方式组合不同组的特征。这种操作方式可以增强不同特征图学得的特征,改进参数的使用和计算效率。
无论梯度路径长度和大规模 ELAN 中计算块的堆叠数量如何,它都达到了稳定状态。如果无限堆叠更多的计算块,可能会破坏这种稳定状态,参数利用率会降低。新提出的 E-ELAN 使用 expand、shuffle、merge cardinality 在不破坏原有梯度路径的情况下让网络的学习能力不断增强。
在架构方面,E-ELAN 只改变了计算块的架构,而过渡层(transition layer)的架构完全没有改变。YOLOv7 的策略是使用组卷积来扩展计算块的通道和基数。研究者将对计算层的所有计算块应用相同的组参数和通道乘数。然后,每个计算块计算出的特征图会根据设置的组参数 g 被打乱成 g 个组,再将它们连接在一起。此时,每组特征图的通道数将与原始架构中的通道数相同。最后,该方法添加 g 组特征图来执行 merge cardinality。除了保持原有的 ELAN 设计架构,E-ELAN 还可以引导不同组的计算块学习更多样化的特征。
因此,对基于串联的模型,我们不能单独分析不同的扩展因子,而必须一起考虑。该研究提出图 (c),即在对基于级联的模型进行扩展时,只需要对计算块中的深度进行扩展,其余传输层进行相应的宽度扩展。这种复合扩展方法可以保持模型在初始设计时的特性和最佳结构。
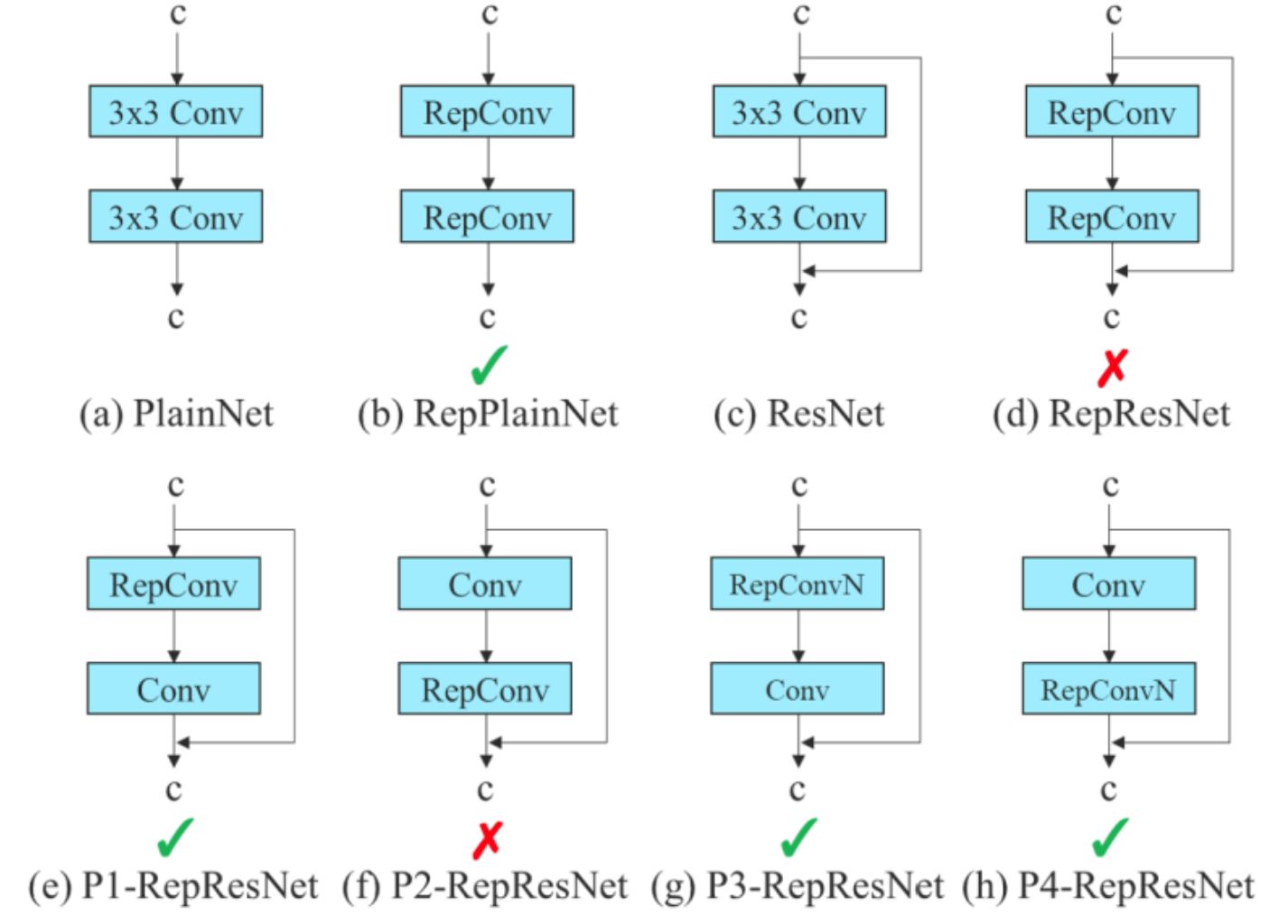
此外,该研究使用梯度流传播路径来分析如何重参数化卷积,以与不同的网络相结合。下图展示了该研究设计的用于 PlainNet 和 ResNet 的「计划重参数化卷积」。
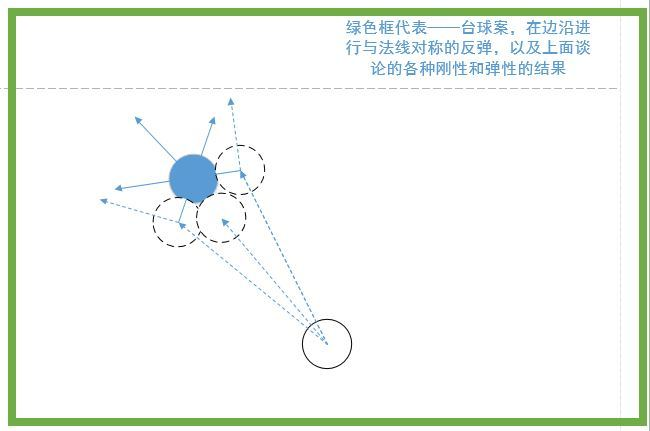
5.台球击球路线原理
(1)球路的选定
台球的瞄准方法,是根据力的直线传递原理,通过主球撞击目标球,目标球被撞击后,便沿着直线进入球袋。因为球台上有6个球袋,分别固定在四角和边岸中部,而球是可以在球台上到处滚动的,要想把其中某一个球打进球袋,必须在球群中观察选择,哪个球的球路、角度最合适、容易进袋,在袋口附近有一个目标球,要想使这个球进袋,便要先看看球路是否合适,然后由球袋口中心,通过目标球中心,划一条直线,这条直线便是目标球进袋要走的路线。
(2)目标球上的击点
因为目标球没有外力推动本身是不能滚动的,必须通过主球的撞击才行。根据力的直线传递原理,要把某个目标球打进球袋,不能随便乱撞目标球上的任何点位,必须根据目标球的进袋线路,确定主球应该撞击目标球上的击点位置,才能完成打球入袋。
由目标球所对着的球袋中心,经过目标球中心延长线,这条线和目标球外圆相交在M点,这个点便是目标球上的击点。
(3)瞄准点
目标球上的击点确定之后,接着要确定瞄准点的位置。从目标球上的击点M,再沿这条直线向后,量出一段与球的半径相等的长度,最远点T就是瞄准点。以T点为圆心划一个圆形虚线,这个圆球形表示主球要撞击目标球必须来到的位置,主球与目标球的外圆才能在M点相交,与目标球相撞击,主球上的力量便通过M点传递给目标球,使它沿目标球球路入袋。
6.整合代码实现
import torch, cv2, os, tqdm
import numpy as np
import numpy as np
from yolov5.yolo import YOLOV5_Detect, opt
def get_hole(pred):
pred[pred == 1] = 0
pred[pred != 0] = 255
contours, hierarchy = cv2.findContours(pred[:, :, 0], cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
return contours
def distance(x1,y1,x2,y2):
return ((x1 - x2)**2+(y1 - y2)**2)**0.5
if __name__ == '__main__':
DEVICE = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(DEVICE)
model = torch.load('model.pkl')
model.to(DEVICE)
if not os.path.exists('output'):
os.mkdir('output')
path = 'detect'
yolo_detect = YOLOV5_Detect(**vars(opt))
for i in tqdm.tqdm(os.listdir(path)):
# 读取图像
ori_img = cv2.imdecode(np.fromfile('{}/{}'.format(path, i), np.uint8), cv2.IMREAD_COLOR)
yolov5_res,balllist,ballvalue = yolo_detect.detect(ori_img)
# 记录原图尺寸
img_shape = ori_img.shape
# Resize到训练大小 640*320
img_ = cv2.resize(ori_img, (640, 320))
# 转换通道 归一化
img = np.transpose(np.expand_dims(img_, axis=0), (0, 3, 1, 2)) / 255.0
# 转换成tensor格式
img = torch.from_numpy(img).to(DEVICE).float()
# 预测
pred = np.argmax(model(img).cpu().detach().numpy()[0], axis=0)
# 1 2 对应着目标类别
pred_mask = []
for j in pred.reshape((-1)):
if j == 0:
pred_mask.append(np.array([0, 0, 0]))
elif j == 1:
pred_mask.append(np.array([0, 0, 255]))
elif j == 2:
pred_mask.append(np.array([255, 0, 0]))
pred_mask = np.array(pred_mask, dtype=np.uint8).reshape((pred.shape[0], pred.shape[1], 3))
pred = np.expand_dims(pred, axis=-1)
pred = np.repeat(pred, axis=-1, repeats=3)
pred = np.array(pred, dtype=np.uint8)
pred = cv2.resize(pred, (img_shape[1], img_shape[0]), interpolation=cv2.INTER_NEAREST)
pred_mask = cv2.resize(pred_mask, (img_shape[1], img_shape[0]), interpolation=cv2.INTER_NEAREST)
contours = get_hole(pred)
pred[pred == 0] = 255
pred[pred != 255] = 0
yolov5_res = yolov5_res & pred
# yolov5_res = cv2.addWeighted(yolov5_res, 0.5, pred_mask, 0.5, 0)
# ori_img = yolov5_res & pred
holes_coordinate = []
radius = 0
number = 0
for cnts in contours:
x, y, w, h = cv2.boundingRect(cnts)
holes_coordinate.append([x, y, w, h])
radius = radius + (w + h)/2
number = number + 1
holllist = []
hollvalue = []
holes_coordinate = sorted(holes_coordinate, key=lambda x:x[2] * x[3], reverse=True)[:6]
holes_coordinate = sorted(holes_coordinate, key=lambda x:x[1])
for idx, (x, y, w, h) in enumerate(sorted(holes_coordinate[:3], key=lambda x:x[0])):
cv2.rectangle(yolov5_res, (x, y), (x + w, y + h), (255, 0, 0), 2)
cv2.putText(yolov5_res, '{:.0f}'.format(idx + 1),
(x, y + 25), cv2.FONT_HERSHEY_SIMPLEX, 1.0,
(255, 0, 0), 2)
holllist.append(idx + 1)
hollvalue.append([x + w / 2, y + h / 2, (w + h) / 2])
#print('hole {} x_center:{:.2f} y_center:{:.2f} radius:{:.2f}'.format(idx + 1, x + w / 2, y + h / 2, (w + h) / 2))
for idx, (x, y, w, h) in enumerate(sorted(holes_coordinate[3:], key=lambda x:x[0])):
cv2.rectangle(yolov5_res, (x, y), (x + w, y + h), (255, 0, 0), 2)
cv2.putText(yolov5_res, '{:.0f}'.format(idx + 4),
(x, y + 25), cv2.FONT_HERSHEY_SIMPLEX, 1.0,
(255, 0, 0), 2)
holllist.append(idx + 4)
hollvalue.append([x + w / 2, y + h / 2, (w + h) / 2])
#print('hole {} x_center:{:.2f} y_center:{:.2f} radius:{:.2f}'.format(idx + 4, x + w / 2, y + h / 2, (w + h) / 2))
for m in range(len(balllist)):
cv2.circle(yolov5_res, (int(ballvalue[m][0]),int(ballvalue[m][1])), int(ballvalue[m][2]), [0,0,255], 2)
cv2.imshow('input', yolov5_res)
cv2.waitKey(0)
print(balllist)
print(ballvalue)
print(holllist)
print(hollvalue)
a = input("请输入母球编号: ")
b = input("请输入目标球编号: ")
c = input("请输入袋口编号: ")
x1 = int(ballvalue[balllist.index(int(a))][0])
y1 = int(ballvalue[balllist.index(int(a))][1])
r1 = int(ballvalue[balllist.index(int(a))][2])
x2 = int(ballvalue[balllist.index(int(b))][0])
y2 = int(ballvalue[balllist.index(int(b))][1])
r2 = int(ballvalue[balllist.index(int(b))][2])
x3 = int(hollvalue[holllist.index(int(c))][0])
y3 = int(hollvalue[holllist.index(int(c))][1])
r3 = int(hollvalue[holllist.index(int(c))][2])
#画出目标球的可能行进路线:
def drawline(yolov5_res,x1,y1,x2,y2,r):
gen = ((x2-x1)**2+(y2-y1)**2)**0.5
x3 = int(x1 - (y2-y1)*r/gen)
y3 = int(y1 + (x2-x1)*r/gen)
x4 = int(x2 - (y2-y1)*r/gen)
y4 = int(y2 + (x2-x1)*r/gen)
x5 = int(x1 + (y2 - y1) * r / gen)
y5 = int(y1 - (x2 - x1) * r / gen)
x6 = int(x2 + (y2 - y1) * r / gen)
y6 = int(y2 - (x2 - x1) * r / gen)
cv2.line(yolov5_res, (x3, y3), (x4, y4), (255, 255, 255), 3)
cv2.line(yolov5_res, (x5, y5), (x6, y6), (255, 255, 255), 3)
return yolov5_res
cv2.line(yolov5_res,(x2,y2),(x3,y3),(255, 0, 0),3)
yolov5_res = drawline(yolov5_res,x2,y2,x3,y3,r2)
#画出撞击点
xz = int(x3 + (x2 - x3)*((r1+r2) + distance(x2,y2,x3,y3))/(distance(x2,y2,x3,y3)))
yz = int(y3 + (y2 - y3)*((r1+r2) + distance(x2,y2,x3,y3))/(distance(x2,y2,x3,y3)))
cv2.circle(yolov5_res, (xz,yz), int(ballvalue[balllist.index(int(a))][2]), [255, 0, 0], 2)
#画出母球的行进路线
cv2.line(yolov5_res, (xz, yz), (x1, y1), (255, 0, 0), 3)
yolov5_res = drawline(yolov5_res, xz, yz, x1, y1,r1)
cv2.imshow('output',yolov5_res)
cv2.waitKey(0)
#cv2.imwrite('output/{}'.format(i), yolov5_res)
7.项目文件展示
智能推荐
python中文显示不出来_解决Python词云库wordcloud不显示中文的问题-程序员宅基地
文章浏览阅读2.6k次。解决Python词云库wordcloud不显示中文的问题2018-11-25背景:wordcloud是基于Python开发的词云生成库,功能强大使用简单。github地址:https://github.com/amueller/word_cloudwordcloud默认是不支持显示中文的,中文会被显示成方框。安装:安装命令:pip install wordcloud解决:经过测试发现不支持显示中文..._词云python代码无法输出文字
JVM在线分析-解决问题的工具一(jinfo,jmap,jstack)_jmap 在线分析-程序员宅基地
文章浏览阅读807次。扩展。_jmap 在线分析
台式计算机cpu允许温度,玩游戏cpu温度多少正常(台式电脑夏季CPU一般温度多少)...-程序员宅基地
文章浏览阅读1.1w次。随着炎热夏季的到来,当玩游戏正爽的时候,电脑突然死机了,自动关机了,是不是有想给主机一脚的冲动呢?这个很大的原因是因为CPU温度过高导致的。很多新手玩家可能都有一个疑虑,cpu温度多少以下正常?有些说是60,有些说是70,到底多高CPU温度不会死机呢?首先我们先看看如何查看CPU的温度。下载鲁大师并安装,运行鲁大师软件,即可进入软件界面,并点击温度管理,即可看到电脑各个硬件的温度。鲁大师一般情况下..._台式机玩游戏温度多少正常
小白自学Python日记 Day2-打印打印打印!_puthon打印任务收获-程序员宅基地
文章浏览阅读243次。Day2-打印打印打印!我终于更新了!(哭腔)一、 最简单的打印最最简单的打印语句: print(“打印内容”)注意:python是全英的,符号记得是半角下面是我写的例子:然后进入power shell ,注意:你需要使用cd来进入你保存的例子的文件夹,保存时名字应该取为xxx.py我终于知道为什么文件夹取名都建议取英文了,因为进入的时候是真的很麻烦!如果你没有进入正确的文件夹..._puthon打印任务收获
Docker安装:Errors during downloading metadata for repository ‘appstream‘:_"cenerrors during download metadata for repository-程序员宅基地
文章浏览阅读1k次。centos8问题参考CentOS 8 EOL如何切换源? - 云服务器 ECS - 阿里云_"cenerrors during download metadata for repository \"appstream"
尚硅谷_谷粒学苑-微服务+全栈在线教育实战项目之旅_基于微服务的在线教育平台尚硅谷-程序员宅基地
文章浏览阅读2.7k次,点赞3次,收藏11次。SpringBoot+Maven+MabatisPlusmaven在新建springboot项目引入RELEASE版本出错maven在新建springboot项目引入RELEASE版本出错maven详解maven就是通过pom.xml中的配置,就能够从仓库获取到想要的jar包。仓库分为:本地仓库、第三方仓库(私服)、中央仓库springframework.boot:spring-boot-starter-parent:2.2.1.RELEASE’ not found若出现jar包下载不了只有两_基于微服务的在线教育平台尚硅谷
随便推点
网络学习第六天(路由器、VLAN)_路由和vlan-程序员宅基地
文章浏览阅读316次。路由的概念路由器它称之为网关设备。路由器就是用于连接不同网络的设备路由器是位于OSI模型的第三层。路由器通过路由决定数据的转发。网关的背景:当时每家计算机厂商,用于交换数据的通信程序(协议)和数据描述格式各不相同。因此,就把用于相互转换这些协议和格式的计算机称为网关。路由器与三层交换器的对比路由协议对比路由器的作用:1.路由寻址2.实现不同网络之间相连的功能3.通过路由决定数据的转发,转发策略称为 路由选择。VLAN相关技术什么是VLAN?中文名称叫:虚拟局域网。虚_路由和vlan
设置div背景颜色透明度,内部元素不透明_div设置透明度,里面的内容不透明-程序员宅基地
文章浏览阅读2.8w次,点赞6次,收藏22次。设置div背景颜色透明度,内部元素不透明:.demo{ background-color:rgba(255,255,255,0.15) } 错误方式:.demo{ background-color:#5CACEE;opacity:0.75;} 这样会导致div里面的元素内容和背景颜色一起变透明只针对谷歌浏览器的测试_div设置透明度,里面的内容不透明
Discuz!代码大全-程序员宅基地
文章浏览阅读563次。1.[ u]文字:在文字的位置可以任意加入您需要的字符,显示为下划线效果。2.[ align=center]文字:在文字的位置可以任意加入您需要的字符,center位置center表示居中,left表示居左,right表示居右。5.[ color=red]文字:输入您的颜色代码,在标签的中间插入文字可以实现文字颜色改变。6.[ SIZE=数字]文字:输入您的字体大小,在标签的中间插入文..._discuzcode 大全
iOS NSTimer定时器-程序员宅基地
文章浏览阅读2.6k次。iOS中定时器有三种,分别是NSTimer、CADisplayLink、dispatch_source,下面就分别对这三种计时器进行说明。一、NSTimerNSTimer这种定时器用的比较多,但是特别需要注意释放问题,如果处理不好很容易引起循环引用问题,造成内存泄漏。1.1 NSTimer的创建NSTimer有两种创建方法。方法一:这种方法虽然创建了NSTimer,但是定时器却没有起作用。这种方式创建的NSTimer,需要加入到NSRunLoop中,有NSRunLoop的驱动才会让定时器跑起来。_ios nstimer
Linux常用命令_ls-lmore-程序员宅基地
文章浏览阅读4.8k次,点赞17次,收藏51次。Linux的命令有几百个,对程序员来说,常用的并不多,考虑各位是初学者,先学习本章节前15个命令就可以了,其它的命令以后用到的时候再学习。1、开机 物理机服务器,按下电源开关,就像windows开机一样。 在VMware中点击“开启此虚拟机”。2、登录 启动完成后,输入用户名和密码,一般情况下,不要用root用户..._ls-lmore
MySQL基础命令_mysql -u user-程序员宅基地
文章浏览阅读4.1k次。1.登录MYSQL系统命令打开DOS命令框shengfen,以管理员的身份运行命令1:mysql -u usernae -p password命令2:mysql -u username -p password -h 需要连接的mysql主机名(localhost本地主机名)或是mysql的ip地址(默认为:127.0.0.1)-P 端口号(默认:3306端口)使用其中任意一个就OK,输入命令后DOS命令框得到mysql>就说明已经进入了mysql系统2. 查看mysql当中的._mysql -u user