PX4从放弃到精通(十六):控制接口_px4从放弃到精通(十四)-程序员宅基地
**无人机硬件,提供全程指导**
文章目录
前言
PX4固件版本:1.12.3稳定版,1.14.0稳定版
一、OFFBOARD控制
在PX4中OFFBOARD模式可以直接给入期望的控制量,从而实现无人机的自主控制,包括位置、速度、加速度、姿态角、姿态角速度和控制力矩。
1. 进入OFFBOARD模式并解锁
vehicle_status_s _status;
vehicle_command_s _command = {
};
offboard_control_mode_s ocm{
};
uORB::Publication<offboard_control_mode_s> _offboard_control_mode_pub{
ORB_ID(offboard_control_mode)};
uORB::Publication<vehicle_command_s> _vehicle_command_pub{
ORB_ID(vehicle_command)};
uORB::Subscription _vehicle_status_sub{
ORB_ID(vehicle_status)};
_vehicle_status_sub.copy(&_status);
_command.target_system = _status.system_id;
_command.target_component = _status.component_id;
ocm.timestamp = hrt_absolute_time();
_offboard_control_mode_pub.publish(ocm);
_command.command =vehicle_command_s::VEHICLE_CMD_DO_SET_MODE;
_command.param1=1.0f;
_command.param2 = PX4_CUSTOM_MAIN_MODE_OFFBOARD;
_command.timestamp = hrt_absolute_time();
_vehicle_command_pub.publish(_command);
usleep(10000);
_command.command = vehicle_command_s::VEHICLE_CMD_COMPONENT_ARM_DISARM;
_command.param1 = 1.0f;
_command.timestamp = hrt_absolute_time();
_vehicle_command_pub.publish(_command);
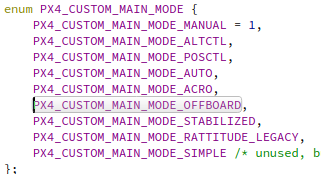
其中offboard_control_mode消息是OFFBOARD模式的心跳包,必须以最低2Hz的频率发布,注意发布时必须赋值系统时间戳,否则会自动推出OFFBOARD模式,切换OFFBOARD模式并解锁是利用vehicle_command消息来实现的,将command 成员赋值为vehicle_command_s::VEHICLE_CMD_DO_SET_MODE,然后将param1赋值为1.0f,将param2 赋值为PX4_CUSTOM_MAIN_MODE_OFFBOARD即可切换为OFFBOARD模式。解锁则是将command赋值为vehicle_command_s::VEHICLE_CMD_COMPONENT_ARM_DISARM,将param1 赋值为1.0f并发布。
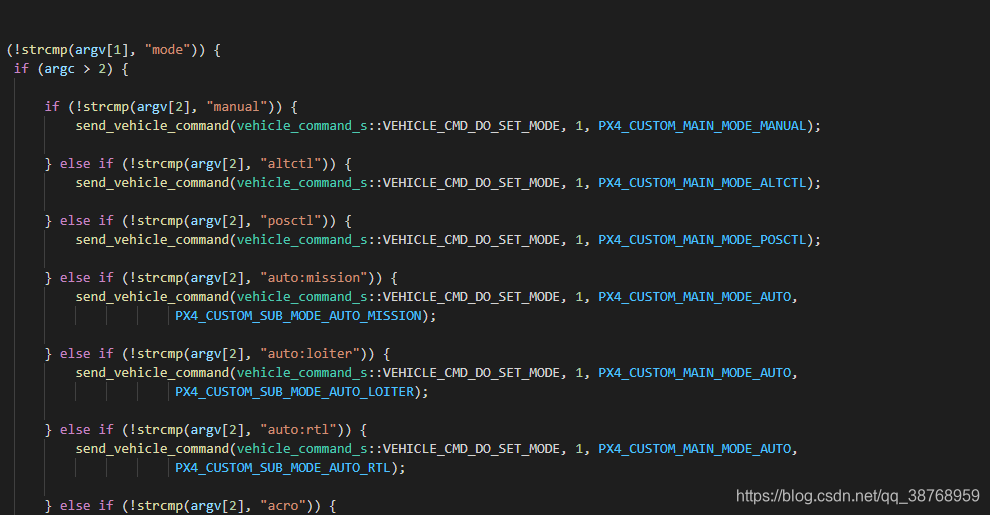
OFFBOARD模式属于PX4的主模式,进入其他主模式与之相同,其他主模式有
2. 发布控制量
我这里以本地位置为例
vehicle_local_position_setpoint_s sp_local{
};
uORB::Publication<vehicle_local_position_setpoint_s> _trajectory_setpoint_pub{
ORB_ID(trajectory_setpoint)};
sp_local.x=0;
sp_local.y=0;
sp_local.z=-5;
sp_local.timestamp = hrt_absolute_time();
_trajectory_setpoint_pub.publish(sp_local);
ocm.position=true;
ocm.timestamp = hrt_absolute_time();
_offboard_control_mode_pub.publish(ocm);
由于是发布的期望位置,因此需要将ocm.position置为true,同时赋值trajectory_setpoint消息并发布,无人机将按期望的位置进行飞行。需要注意的是,期望的位置需要不停的发布,否则无人机也不能按期望的位置飞行。并且只有在OFFBOARD模式下,发布这些值才有效
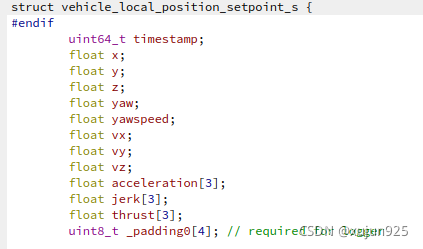
我这里是让飞机原地上升5米,如果想控制其他的状态,可以使用这个消息的其他成员,包括位置、速度、加速度、偏航角、偏航角速度、推力。如下:
二、COMMAND控制
COMMAND话题提供了很多控制接口
1.模式切换
以降落模式为例
如果想让无人机自动降落,可以用command消息将飞行模式设置为LAND模式即可,LAND模式属于从模式,因此需要设置参数如下
_command.command =vehicle_command_s::VEHICLE_CMD_DO_SET_MODE;
_command.param1=1.0f;
_command.param2 = PX4_CUSTOM_MAIN_MODE_AUTO;
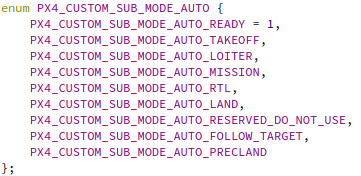
_command.param3 = PX4_CUSTOM_SUB_MODE_AUTO_LAND;
如果需要设置为其他从模式,方法同设置land模式一样,其他从模式如下:
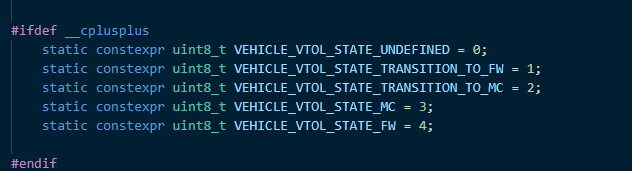
2.垂起模式切换
垂起无人机存在旋翼和固定翼两种飞行模式,切换方法如下
旋翼切换到固定翼
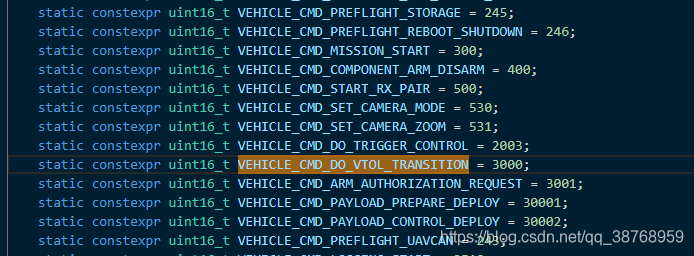
_command.command = vehicle_command_s::VEHICLE_CMD_DO_VTOL_TRANSITION;
_command.param1 = 4.0f;
_vehicle_command_pub.publish(_command);
固定翼切换到旋翼
_command.command = vehicle_command_s::VEHICLE_CMD_DO_VTOL_TRANSITION;
_command.param1 = 3.0f;
_vehicle_command_pub.publish(_command);
也可以通过文件commander.cpp中的send_vehicle_command进行发送

以垂起切换为例
send_vehicle_command(vehicle_command_s::VEHICLE_CMD_DO_VTOL_TRANSITION,
(float)(status.vehicle_type == vehicle_status_s::VEHICLE_TYPE_ROTARY_WING ?
vtol_vehicle_status_s::VEHICLE_VTOL_STATE_FW :
vtol_vehicle_status_s::VEHICLE_VTOL_STATE_MC));
函数send_vehicle_command
第一个参数vehicle_command_s::VEHICLE_CMD_DO_VTOL_TRANSITION就是一个标志位
第二个参数vtol_vehicle_status_s::VEHICLE_VTOL_STATE_FW :也是一个标志位,值是4,表示由旋翼切到固定翼,如果有固定翼切到旋翼,就是3.
参看send_vehicle_command函数可以知道,这个函数是通过发布vehicle_command_s切换模式,我们也可以直接通过发布这个话题实现切换,主要注意两点
一个是vcmd.command = cmd,也就是vcmd.command=vehicle_command_s::VEHICLE_CMD_DO_VTOL_TRANSITION
还有vcmd.param1 = param1;也就是
vcmd.param1 = 3的话就是切到旋翼=4就是切到固定翼。这两个赋值之后再对
vcmd.source_system = vehicle_status_sub.get().system_id;
vcmd.target_system = vehicle_status_sub.get().system_id;
vcmd.source_component = vehicle_status_sub.get().component_id;
vcmd.target_component = vehicle_status_sub.get().component_id;
vcmd.timestamp = hrt_absolute_time();
这些赋值完就可以发布了。发布之后就可以切换模式了
static bool send_vehicle_command(uint16_t cmd, float param1 = NAN, float param2 = NAN, float param3 = NAN,
float param4 = NAN, float param5 = NAN, float param6 = NAN, float param7 = NAN)
{
vehicle_command_s vcmd{};
vcmd.param1 = param1;
vcmd.param2 = param2;
vcmd.param3 = param3;
vcmd.param4 = param4;
vcmd.param5 = (double)param5;
vcmd.param6 = (double)param6;
vcmd.param7 = param7;
vcmd.command = cmd;
uORB::SubscriptionData<vehicle_status_s> vehicle_status_sub{ORB_ID(vehicle_status)};
vcmd.source_system = vehicle_status_sub.get().system_id;
vcmd.target_system = vehicle_status_sub.get().system_id;
vcmd.source_component = vehicle_status_sub.get().component_id;
vcmd.target_component = vehicle_status_sub.get().component_id;
vcmd.timestamp = hrt_absolute_time();
uORB::PublicationQueued<vehicle_command_s> vcmd_pub{ORB_ID(vehicle_command)};
return vcmd_pub.publish(vcmd);
}
如果不知道自己想切换的模式的command和param是多少,可以查看commander.cpp文件里是怎么赋值的
3.输出PWM控制舵机
(这种方法只在老版本PX4中可以,新版不行)
param1 设置舵机通道、param2设置PWM值
_command.command = vehicle_command_s::VEHICLE_CMD_DO_SET_SERVO;
_command.param1 = 舵机通道;
_command.param2 = PWM值;
_vehicle_command_pub.publish(_command);
三、PWM输出接口
(这种方法只在老版本PX4中可以,新版不行)
1.先在机架启动脚本中设置PWM引脚(这步不做的话无法输出PWM波)
以450机架为例
其原来的设置如下
set MIXER quad_x
set PWM_OUT 1234
只设置了四个通道
改成如下
set MIXER quad_x
set PWM_OUT 12345678
set PWM_AUX_OUT 123456
set MIXER_AUX dodeca_bottom_cox
设置PWM通道,同时设置一个辅助混控
这样的话就将其他的通道设置用来输出PWM波
2.调用驱动接口
在自己的线程中添加如下
#include <drivers/drv_pwm_output.h>
#define PX4FMU_DEVICE_PATH "/dev/px4fmu"
int fd = open(PX4FMU_DEVICE_PATH, O_RDWR);//fd打开的是FMU通道
if (fd < 0) {
errx(1, "open fail");
}
if (ioctl(fd, PWM_SERVO_GET_COUNT, (unsigned long)&servo_count) != 0) {
err(1, "Unable to get servo count\n");
}
nt i=6;//i代表第几个PWM通道
ret=ioctl(fd, PWM_SERVO_SET(i), 1000);//PWM值为1000-2000都可以
if (ret != OK) {
PX4_ERR("PWM_SERVO_SET(%d)", i);
}
新版固件自定义PWM输出控制可以参考B站《超维空间科技》,使用actuator控制
智能推荐
攻防世界_难度8_happy_puzzle_攻防世界困难模式攻略图文-程序员宅基地
文章浏览阅读645次。这个肯定是末尾的IDAT了,因为IDAT必须要满了才会开始一下个IDAT,这个明显就是末尾的IDAT了。,对应下面的create_head()代码。,对应下面的create_tail()代码。不要考虑爆破,我已经试了一下,太多情况了。题目来源:UNCTF。_攻防世界困难模式攻略图文
达梦数据库的导出(备份)、导入_达梦数据库导入导出-程序员宅基地
文章浏览阅读2.9k次,点赞3次,收藏10次。偶尔会用到,记录、分享。1. 数据库导出1.1 切换到dmdba用户su - dmdba1.2 进入达梦数据库安装路径的bin目录,执行导库操作 导出语句:./dexp cwy_init/[email protected]:5236 file=cwy_init.dmp log=cwy_init_exp.log 注释: cwy_init/init_123..._达梦数据库导入导出
js引入kindeditor富文本编辑器的使用_kindeditor.js-程序员宅基地
文章浏览阅读1.9k次。1. 在官网上下载KindEditor文件,可以删掉不需要要到的jsp,asp,asp.net和php文件夹。接着把文件夹放到项目文件目录下。2. 修改html文件,在页面引入js文件:<script type="text/javascript" src="./kindeditor/kindeditor-all.js"></script><script type="text/javascript" src="./kindeditor/lang/zh-CN.js"_kindeditor.js
STM32学习过程记录11——基于STM32G431CBU6硬件SPI+DMA的高效WS2812B控制方法-程序员宅基地
文章浏览阅读2.3k次,点赞6次,收藏14次。SPI的详情简介不必赘述。假设我们通过SPI发送0xAA,我们的数据线就会变为10101010,通过修改不同的内容,即可修改SPI中0和1的持续时间。比如0xF0即为前半周期为高电平,后半周期为低电平的状态。在SPI的通信模式中,CPHA配置会影响该实验,下图展示了不同采样位置的SPI时序图[1]。CPOL = 0,CPHA = 1:CLK空闲状态 = 低电平,数据在下降沿采样,并在上升沿移出CPOL = 0,CPHA = 0:CLK空闲状态 = 低电平,数据在上升沿采样,并在下降沿移出。_stm32g431cbu6
计算机网络-数据链路层_接收方收到链路层数据后,使用crc检验后,余数为0,说明链路层的传输时可靠传输-程序员宅基地
文章浏览阅读1.2k次,点赞2次,收藏8次。数据链路层习题自测问题1.数据链路(即逻辑链路)与链路(即物理链路)有何区别?“电路接通了”与”数据链路接通了”的区别何在?2.数据链路层中的链路控制包括哪些功能?试讨论数据链路层做成可靠的链路层有哪些优点和缺点。3.网络适配器的作用是什么?网络适配器工作在哪一层?4.数据链路层的三个基本问题(帧定界、透明传输和差错检测)为什么都必须加以解决?5.如果在数据链路层不进行帧定界,会发生什么问题?6.PPP协议的主要特点是什么?为什么PPP不使用帧的编号?PPP适用于什么情况?为什么PPP协议不_接收方收到链路层数据后,使用crc检验后,余数为0,说明链路层的传输时可靠传输
软件测试工程师移民加拿大_无证移民,未受过软件工程师的教育(第1部分)-程序员宅基地
文章浏览阅读587次。软件测试工程师移民加拿大 无证移民,未受过软件工程师的教育(第1部分) (Undocumented Immigrant With No Education to Software Engineer(Part 1))Before I start, I want you to please bear with me on the way I write, I have very little gen...
随便推点
Thinkpad X250 secure boot failed 启动失败问题解决_安装完系统提示secureboot failure-程序员宅基地
文章浏览阅读304次。Thinkpad X250笔记本电脑,装的是FreeBSD,进入BIOS修改虚拟化配置(其后可能是误设置了安全开机),保存退出后系统无法启动,显示:secure boot failed ,把自己惊出一身冷汗,因为这台笔记本刚好还没开始做备份.....根据错误提示,到bios里面去找相关配置,在Security里面找到了Secure Boot选项,发现果然被设置为Enabled,将其修改为Disabled ,再开机,终于正常启动了。_安装完系统提示secureboot failure
C++如何做字符串分割(5种方法)_c++ 字符串分割-程序员宅基地
文章浏览阅读10w+次,点赞93次,收藏352次。1、用strtok函数进行字符串分割原型: char *strtok(char *str, const char *delim);功能:分解字符串为一组字符串。参数说明:str为要分解的字符串,delim为分隔符字符串。返回值:从str开头开始的一个个被分割的串。当没有被分割的串时则返回NULL。其它:strtok函数线程不安全,可以使用strtok_r替代。示例://借助strtok实现split#include <string.h>#include <stdio.h&_c++ 字符串分割
2013第四届蓝桥杯 C/C++本科A组 真题答案解析_2013年第四届c a组蓝桥杯省赛真题解答-程序员宅基地
文章浏览阅读2.3k次。1 .高斯日记 大数学家高斯有个好习惯:无论如何都要记日记。他的日记有个与众不同的地方,他从不注明年月日,而是用一个整数代替,比如:4210后来人们知道,那个整数就是日期,它表示那一天是高斯出生后的第几天。这或许也是个好习惯,它时时刻刻提醒着主人:日子又过去一天,还有多少时光可以用于浪费呢?高斯出生于:1777年4月30日。在高斯发现的一个重要定理的日记_2013年第四届c a组蓝桥杯省赛真题解答
基于供需算法优化的核极限学习机(KELM)分类算法-程序员宅基地
文章浏览阅读851次,点赞17次,收藏22次。摘要:本文利用供需算法对核极限学习机(KELM)进行优化,并用于分类。
metasploitable2渗透测试_metasploitable2怎么进入-程序员宅基地
文章浏览阅读1.1k次。一、系统弱密码登录1、在kali上执行命令行telnet 192.168.26.1292、Login和password都输入msfadmin3、登录成功,进入系统4、测试如下:二、MySQL弱密码登录:1、在kali上执行mysql –h 192.168.26.129 –u root2、登录成功,进入MySQL系统3、测试效果:三、PostgreSQL弱密码登录1、在Kali上执行psql -h 192.168.26.129 –U post..._metasploitable2怎么进入
Python学习之路:从入门到精通的指南_python人工智能开发从入门到精通pdf-程序员宅基地
文章浏览阅读257次。本文将为初学者提供Python学习的详细指南,从Python的历史、基础语法和数据类型到面向对象编程、模块和库的使用。通过本文,您将能够掌握Python编程的核心概念,为今后的编程学习和实践打下坚实基础。_python人工智能开发从入门到精通pdf