
”相机标定“ 的搜索结果

一文讲清楚opencv相机标定函数calibrateCamera()
自动驾驶行业,机器视觉,计算机视觉通用的相机标定技术,详细讲解,一次搞懂。
相机标定评价标准
相机标定,手眼标定
查看我的个人博客
”张正友标定”是指张正友教授1998年提出的单平面棋盘格的摄像机标定方法[1]。文中提出的方法介于传统标定法和自标定法之间,但克服了传统标定法需要的高精度标定物的缺点,而仅需使用一个打印出来的棋盘格就可以。...
在自动驾驶单目视觉中,相机标定是视觉算法精度的基石,下线标定通常是用的标定板;那么在标定板身后有哪些秘密是我们不知道的呢。
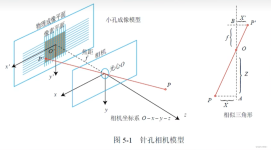
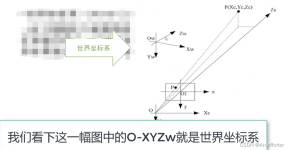
相机标定 摄像机标定是从世界坐标系转换为相机坐标系,再由相机坐标系转换为图像坐标系的过程,也就是求最终的投影矩阵P的过程。 世界坐标系:用户定义的三维世界的坐标系,为了描述目标物在真实世界里的位置而被...
--target 标定板参数信息存放的路径,即我们上面的april_s.yaml的路径 --cam Camera的标定文件路径 --imu IMU的标定文件路径 --bag 录制的Camera-IMU数据包的路径 --bag-from-to 起始和终止时间,单位是秒。...
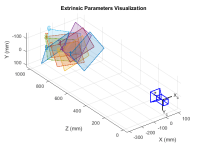
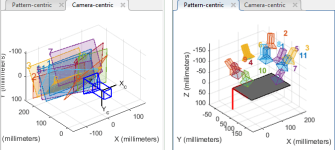
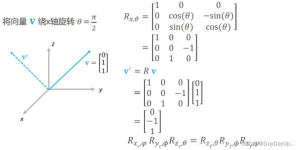
一、旋转矩阵与平移向量对于每一幅相机得到的特定物体的图像,我们可以在摄像机系统上用旋转和平移来描述物体的相对位置。如下图。通常任何维的旋转可以表示为坐标向量与合适尺寸的方阵的乘积(旋转矩阵)。最终一个...
利用电脑相机标定

通过相机图片可以识别出棋盘角点了,这时候我们需要通过角点去计算相机内参矩阵,通过上篇得知畸变的原理,所以我们尽可能要全方位都能获取标定图片,全方位意思是提供的多张图综合起来基本覆盖了相机所有的像素,...
ROS2下进行单目相机标定
采用张正友平面标定法可对相机进行在线标定与离线标定。同时根据标定或者的畸变系数对图像的畸变进行矫正
相机标定相关资源,内含可直接打印的A4棋盘格和两组标定示例图片
从标定板的制作、打印到拍摄成图片一应俱全,并附有相机标定的代码,以及最终标定的结果
运行前需要先准备标定图片和记录标定图片列表的文本文件,并放入程序所在目录下最后在程序所在目录下生成“caliberation_result.txt”文件,记录了标定的误差、相机内外参数信息运行前需要先准备标定图片和记录标定...

本代码是基于Qt5.9.1和Opencv3.3完成的标定,没有平台的限制我都把需要的东西考到一个目录底下了。所以直接就可以打开进行标定。


推荐文章
- EVO-CNN-LSTM-multihead-Attention能量谷算法优化模型结合多头注意力机制多维时序预测-程序员宅基地
- Objective-C 中的id到底是什么-程序员宅基地
- 好记性不如烂笔头---Archlinux优化简介-程序员宅基地
- 3DREM16P-7X/250YG24-8K4V比例减压阀放大器-程序员宅基地
- python文件操作(open()、write()、writelines()、read()、readline()、readlines()、seek()、os)_python open writeline-程序员宅基地
- 分布式限流实战--redis实现令牌桶限流_分布式令牌限流-程序员宅基地
- 【Linux】文件系统-程序员宅基地
- python实现ks算法_python, 在信用评级中,计算KS statistic值-程序员宅基地
- 类加载过程 与 代码的执行顺序_类加载后代码的执行顺序-程序员宅基地
- Oracle LiveLabs实验:Introduction to Oracle Spatial Studio_oracle_spatial 可视化-程序员宅基地