”ROS“ 的搜索结果
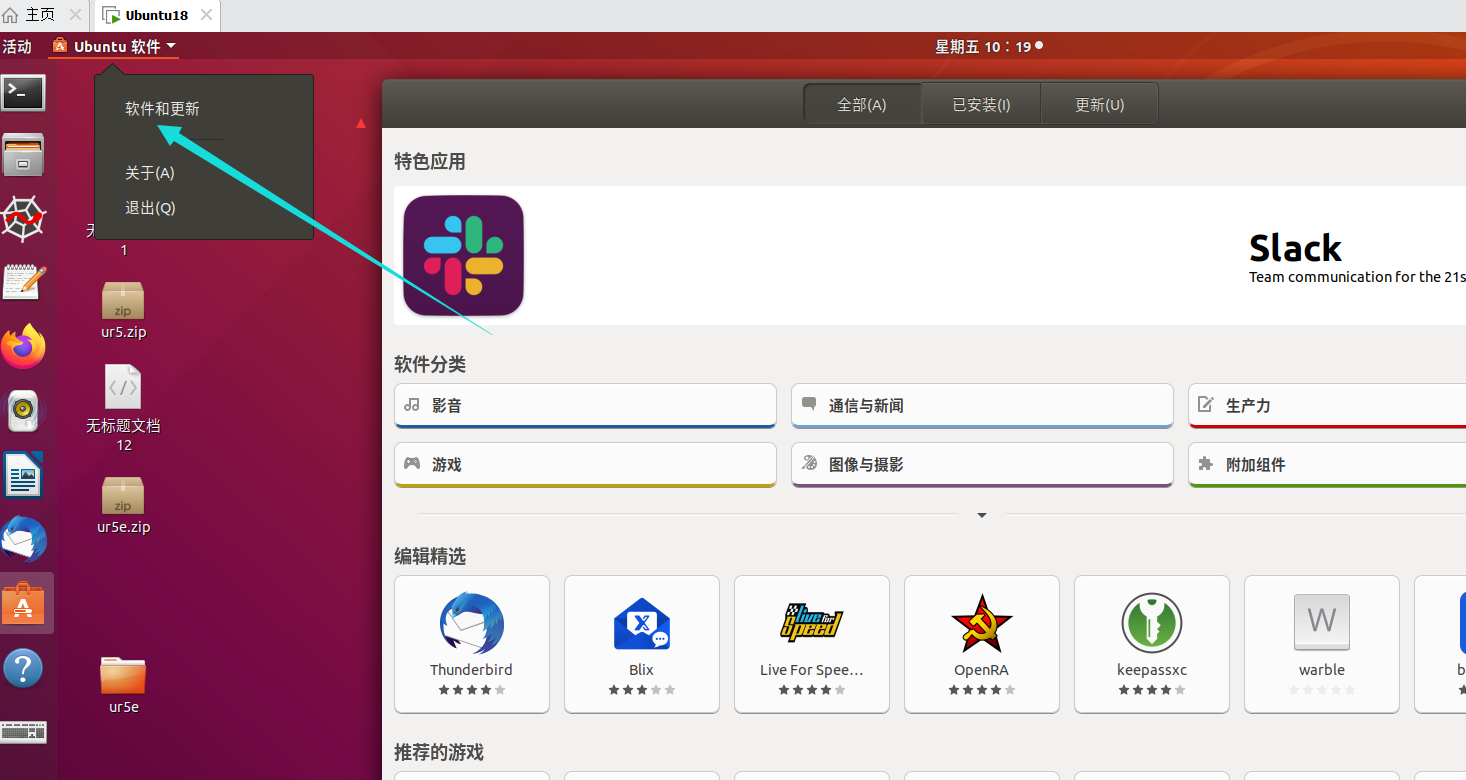
ROS技术严重依赖于操作系统,因此,必须高度熟悉ROS和ubuntu版本信息,才能配置良好环境。Ubuntu20.04是最新的Ubuntu操作系统,而ROS-Noetic是ROS1.0的最后一个版本。属于交替或过渡的版本。官方的安装可以参考:...

ROS安装版本: Noetic 清华源 sudo gedit /etc/apt/sources.list #清华源 deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic main restricted universe multiverse deb ...


因为最近学习的缘故,花了半天的时间安装了ROS,期间因为ubuntu也是临时安装的双系统,遇到了各种各样的问题,这里记录一下,主要集中在ROS系统安装问题的解决。


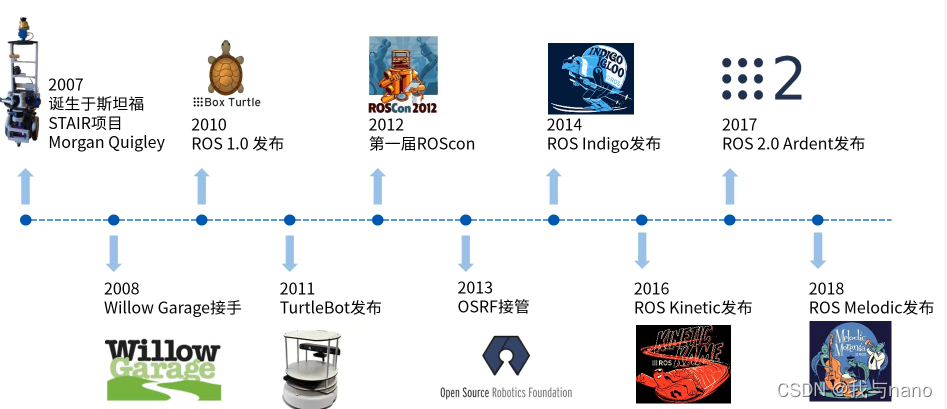
2010年Willow Garage公司发布了开源机器人操作系统ROS(robot operating system),很快在机器人研究领域展开了学习和使用ROS的热潮。ROS是用于编写机器人软件程序的一种具有高度灵活性的软件架构。它包含了大量工具...


2 ROS安装方法(melodic版) 1、添加ROS软件源(TX2使用自带源即可,该步可省去) sudosh -c'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest....

目前,网络上主要的ROS2课程主要有: Constructsim:https://www.theconstructsim.com/robotigniteacademy_learnros/ros-courses-library/ros2-basics-course/ Udemy:...


ROS 2的迭代和更新速度非常快,而ROS 1基本已经发展稳定,目前最新LTS版为Melodic,2020年5月将发布ROS 1终极版Noetic Ninjemys。 ROS 2目前LTS版为Dashing,最新版为Eloquent Elusor。ROS 2支持在Ubuntu上同时部署...
ROS中处理回调数据
标签: ros
ros::spin()与ros::spinOnce(),都是ROS消息回调处理函数。这两个函数需要结合ros::Subscriber()(ROS消息订阅函数)来使用。消息回调处理的意思是调用回调函数处理订阅到的消息。首先,使用ros::Subscriber()进行...
slam是针对自主机器人的,因此,需要Ros下进行开发。这里首先介绍如何安装ROS。 1 版本和操作系统选定 Ubuntu install of ROS Noetic The ROS build farmbuilds Debian packages for several Ubuntu platforms,...
ROS2 基础概念 话题
标签: ROS2

ros2之tello无人机 cozmo-ros2: https://blog.csdn.net/ZhangRelay/article/details/93510762 turtlesim-ros2:https://zhangrelay.blog.csdn.net/article/details/98754130 turtlebot-ros2: ...
ROS1存在的根本问题: 1.无多机器人系统的标准:ROS1中并没有构建多机器人系统的标准方法。 2.平台单一:ROS1基于linux系统,在其他系统中无法安装和使用。 3.实时性差:ROS1缺少实时性方面的设计。 4.稳定性差:ROS...
ros-app下载以及使用注意事项 声明:这里的资源分享仅供学习使用,如有侵犯原创利益,望谅解。 使用ros的手机app连接机器人ros_master进行对机器人控制,摄像头视频显示,地图显示,设定初始点和导航目标点等功能,...
ROS2比ROS1最大不同,在于ROS2用更高明、更专业的程序开发,必备的专业知识有:面向对象、C++、组件编程、动态库、泛型编程、多线程、进程。等诸多的近代程序开发技术,因此,对开发者的要求更高,因此,需要开发者...
推荐文章
- C++语法基础--标准库类型--bitset-程序员宅基地
- [C++] 第三方线程池库BS::thread_pool介绍和使用-程序员宅基地
- 如何使用openssl dgst生成哈希、签名、验签-程序员宅基地
- ios---剪裁圆形图片方法_ios软件圆形剪裁-程序员宅基地
- No module named 'matplotlib.finance'及name 'candlestick_ochl' is not defined强力解决办法-程序员宅基地
- 基于java快递代取计算机毕业设计源码+系统+lw文档+mysql数据库+调试部署_快递企业涉及到的计算机语言-程序员宅基地
- RedisTemplate与zset redis_redistemplate zset-程序员宅基地
- 服务器虚拟化培训计划,vmware虚拟机使用培训(一)概要.ppt-程序员宅基地
- application/x-www-form-urlencoded方式对post请求传参-程序员宅基地
- 网络安全常见十大漏洞总结(原理、危害、防御)-程序员宅基地