
”ROS学习笔记“ 的搜索结果

本博文是基于这个ROS软件包(https://github.com/hrnr/m-explore)的学习笔记 目录 multi robot exploration nav_msgs/OccupancyGrid map_msgs/OccupancyGridUpdate move_base multirobot_map_merge 参考资料 ...
摆烂才是王道


Part 2 ROS学习笔记1
标签: doc文档
ROS Robotics Projects Second Edition第三章 建立移动机械臂目标建立移动小车模型和机械臂模型将两个模型连接到一起1.初始化工作
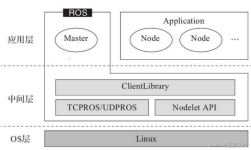
本文主要是根据B站中科院软件所-机器人操作系统入门(ROS入门教程)总结的笔记。
测试文件是test.txt,666的意思是改为可读可写的文件。2.修改文件只读属性。
文章仅供个人学习使用。

必须包含:ROS的主题(),服务/客户(),动作库和参数服务器组件的使用。汉字居于画布中央,笔画不少于 555 划,不能连笔。能够控制书写的开始,并显示书写速度。汉字的数据以参数方式保存在配置文件中。书写完成...

欢迎理性讨论,共同进步
话题通信——订阅方实现
而相比于直接查看ROS官网顺序比较杂乱且为英文的wiki tutorials,古月居的《ROS入门21讲》课程更加系统,对于初学者来说接受度会比较高,但观看视频课程和记笔记同样需要大量的时间。 本文就是博主基于古月居的《ROS...
ROS学习笔记(二)
标签: 学习

从零开始的ROS学习笔记,持续更新


ROS系统钟,用c++程序发布导航目标点。

ROS学习笔记17:MoveIt!机械臂控制
推荐文章
- Python Django 版本对应表以及Mysql对应版本_django版本和mysql对应关系-程序员宅基地
- Maven的pom.xml文件结构之基本配置packaging和多模块聚合结构_pom <packaging>-程序员宅基地
- Composer 原理(二) -- 小丑_composer repositories-程序员宅基地
- W5500+F4官网TCPClient代码出现IP读取有问题,乱码问题_w5500 ping 网络助手 乱码 send(sock_tcps,tcp_server_buff,-程序员宅基地
- Python 攻克移动开发失败!_beeware-程序员宅基地
- Swift4.0_Timer 的基本使用_swift timer 暂停-程序员宅基地
- 元素三大等待-程序员宅基地
- Java软件工程师职位分析_java岗位分析-程序员宅基地
- Java:Unreachable code的解决方法_java unreachable code-程序员宅基地
- 标签data-*自定义属性值和根据data属性值查找对应标签_如何根据data-*属性获取对应的标签对象-程序员宅基地