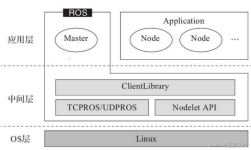
ROS常用的概念(一) 下面的概念可能并不是完全准确,但是力求精简便于理解. 他们的具体内容会在程序中更详细讲解 1: message: 即消息.机器人需要传感器,传感器采集到的信息,即这儿的message. 假如我...
”ROS程序开发自学笔记“ 的搜索结果
发布下我自己学习ros的入门级笔记
测试文件是test.txt,666的意思是改为可读可写的文件。2.修改文件只读属性。

ROS和C马克学习笔记
标签: 笔记
ROS和C马克学习笔记
工程说明:https://blog.csdn.net/gs1069405343/article/details/88618076
官方文档的学习笔记,重点在于各种命令使用
devel:开发空间, install:安装空间 创建工作空间 mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src catkin_init_workspace 编译工作空间 cd ~/catkin_ws/ catkin_make (产生devel 和build文件夹) catkin_make ...
在ROS导航中,激光雷达(Laser Scanner)通常被用于感知机器人周围的环境,进行障碍物检测和建图,以支持导航。在ROS导航中,常见的激光雷达消息类型是 sensor_msgs/LaserScan。sensor_msgs/LaserScan 用于表示激光...
Visual Studio Code,简称VSCode,是微软在2015年推出的一个轻量但功能强大的源代码编辑器,支持 Windows、Linux和 macOS操作系统,扩展组件非常丰富,可以快速搭建成为项目开发的神兵利器。
1.catkin程序包的组成 该程序包必须包含catkin compliant package.xml文件,这个package.xml文件提供有关程序包的元信息。 程序包必须包含一个catkin版本的CMakeLists.txt文件。 每个目录下只能有一个...

摆烂才是王道
ROS 学习笔记(一)
标签: 学习

2013年的时候已经接触ROS了,当时断断续续学习了一些ROS的基础知识。16年搬到深圳之后,也有幸参加过星火的一次关于ROS的一些活动。当时活动的主讲之一是CSDN上ROS知识传播界的大牛的古月和港中文的林天麟先生。然而...
ROS系统钟,用c++程序发布导航目标点。
和其他代码开发一样,首先建立一个工作空间,一个工作空间下可以有多个功能包,一个功能包可以有多个节点存在(或者一个功能包只有一个节点)ROS2中功能包根据编译方式的不同分为三种类型:cmake: 适用于C++。...
ROS的学习资料ppt和笔记
标签: roslyn
一些ROS的学习资料
根据胡春旭的ROS机器人实践开始学习,环境配置好,开发软件使用Roboware。在实践3.6.5时报错:找不到可执行文件,更改cmakelists.txt里依赖项通过。成功运行。catkin_package(CATKIN_DEPENDS roscpp rospy std_msgs)...
ros2订阅发布通讯

ROS2 学习古月居ros21讲学习笔记
ROS2学习第一章 虚拟机VirtualBox安装Ubuntu22.04


Part 2 ROS学习笔记1
标签: doc文档
ROS Robotics Projects Second Edition第三章 建立移动机械臂目标建立移动小车模型和机械臂模型将两个模型连接到一起1.初始化工作
https://wiki.ros.org/tf2_geometry_msgs https://wiki.ros.org/tf2_bullet
推荐文章
- Android 编译so文件 MP4V2_android下编译mp4v2-程序员宅基地
- 通讯录Contact_02_contact文件内容-程序员宅基地
- Qt笔记(四十二)之QZXing的编译 配置 使用_qzxingfilterrunnable error:-程序员宅基地
- 关于画图软件Dia打开程序始终为英文界面的问题-程序员宅基地
- OpenCV从入门到精通实战(二)——文档OCR识别(tesseract)-程序员宅基地
- 详解avcodec_receive_packet 11_avcodec_receive_packet eagain-程序员宅基地
- OpenGL SuperBible 7th源码编译记录_superbible7-media github-程序员宅基地
- Wireshark简单使用-程序员宅基地
- MXNet 粗糙的使用指南_iou loss mxnet-程序员宅基地
- iOS对ipa包进行代码混淆《二》 ---代码混淆_ipa包混淆-程序员宅基地