”can“ 的搜索结果
can standard
标签: can
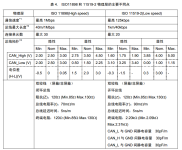
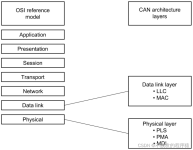
Road vehicles — Controller area network(CAN) —Part 1:Data link layer and physical signalling
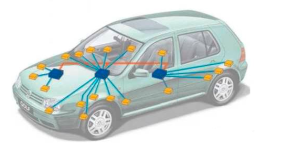
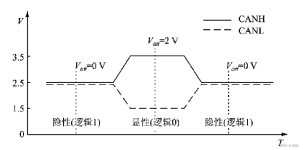
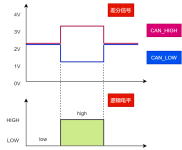
CAN通信是一种多节点通信协议,最早由Bosch公司开发并在1986年首次推出。...CAN总线由两根线组成,分别是CAN_H(CAN High)和CAN_L(CAN Low)。CAN总线使用不同的电压电平来表示0和1,并通过差分信号传输来抗干扰。
STM32 CAN控制器
标签: stm32
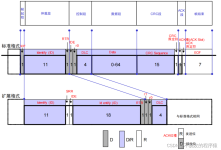
STM32 CAN控制器(bxCAN),支持CAN2.0A和CAN2.0B Active 版本协议CAN 2.0A 只能处理标准数据帧且扩展帧内容会识别错误,而CAN 2.0B Active 可以处理标准数据帧和扩展数据帧。CAN 2.0B Passive 只能处理标准数据帧且...
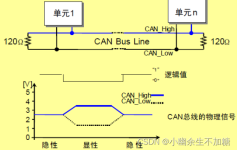
正常情况下,逻辑高电平为1,逻辑低电平为0,但是CAN总线却是逻辑高电平为0,称为显性,逻辑低电平为1,称为隐性。如果多个节点同时访问总线,CAN使用非破坏式、逐位仲裁的方式决定哪个节点使用总线:各发送节点从...
CAN常用芯片选型总结
标签: CAN 芯片
完全支持CAN总线V2.0A和V2.0B技术规范,通信 速率为1 Mb/s: - 0 - 8 字节报文长度 - 标准和扩展数据帧 - 可编程位传输速率可达1 Mb/s SJA1000 特性 -- 和PCA82C200 独立CAN 控制器引脚兼容 -- 和PCA82C200 独立CAN ...
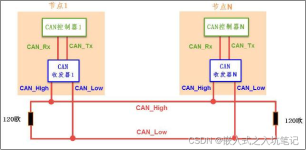
前言 从接触STM32到现在,我感觉CAN通讯可以...与I2C,SPI等同步通讯方式不同,CAN通讯是异步通讯,也就是没有时钟信号线来保持信号接收同步,它有CAN_HIGH与CAN_LOW两条信号线组成。这两条线的组合方式也就造成了...
stm32c8t6的CAN基础代码
STM32学习软件编程资料,STM32F103C8单片机经典外设应用设计实例软件源代码,KEIL工程文件,可供学习参考。
本文简单介绍了在STM32F407上的CAN总线调试过程,解决了一个数据接收的问题,简单整理了一下调试的过程和思路。
CAN总线(Controller Area Network Bus)控制器局域网总线.CAN总线是由BOSCH公司开发的一种简洁易用、传输速度快、易扩展、可靠性高的串行通信总线,广泛应用于汽车、嵌入式、工业控制等领域。
本文主要介绍了deepspeed出现UnicodeDecodeError:‘utf-8’ codec can’t decode byte 0x89 in position 1: invalid start byte解决方案,希望能对使用deepspeed的同学们有所帮助。 文章目录 1. 问题描述 2. ...

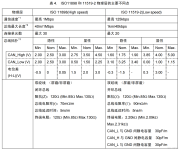
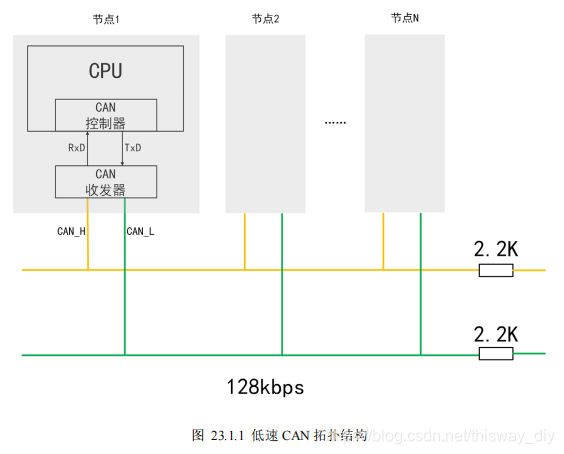

低速 CAN(ISO11519) 通信速率 10~125Kbps,总线长度可达 1000 米高速 CAN(ISO11898) 通信速率 125Kbps~1Mbps,总线长度 ≤40 米(经典CAN)CAN FD 通信速率可达 5Mbps,并且兼容经典 CAN,遵循 ISO 11898-1 做数据...
CAN通讯的实现步骤: 1.CAN初始化 2.CAN发送函数 3.CAN接收函数 4.中断函数
H的电平为3.5V,CAN_L线的电平为1.5V,CAN_H和CAN_L的电压差为2V左右,CAN_H和CAN_L线上的电压均为2.5v, CAN_H和CAN_L之间的电压差为0V。1、位错误:当总线赢得发送权后,会对总线电平进行侦听,当发送的电平和侦听...
汽车CAN总线CAN网络汽车网络CAN基础知识CAN总线通信详解资料合集 2008晶锐 ( Fabia )14_CAN 总线网络连接驱动和诊断电路图.pdf 2012款奔驰212远程信息处理控制器区域网络(CAN)的电路图.pdf CAN总线通信详解.pdf CAN...
基于STM32单片机的汽车CAN_J1939协议测试源码,可供学习设计参考。 main(void) { SystemInit(); //设置系统时钟为72M KeyInit(); //按键管脚初始化 LED_GPIO_Config();//LED管脚初始化 CAN_GPIO_Config();//...
推荐文章
- C++语法基础--标准库类型--bitset-程序员宅基地
- [C++] 第三方线程池库BS::thread_pool介绍和使用-程序员宅基地
- 如何使用openssl dgst生成哈希、签名、验签-程序员宅基地
- ios---剪裁圆形图片方法_ios软件圆形剪裁-程序员宅基地
- No module named 'matplotlib.finance'及name 'candlestick_ochl' is not defined强力解决办法-程序员宅基地
- 基于java快递代取计算机毕业设计源码+系统+lw文档+mysql数据库+调试部署_快递企业涉及到的计算机语言-程序员宅基地
- RedisTemplate与zset redis_redistemplate zset-程序员宅基地
- 服务器虚拟化培训计划,vmware虚拟机使用培训(一)概要.ppt-程序员宅基地
- application/x-www-form-urlencoded方式对post请求传参-程序员宅基地
- 网络安全常见十大漏洞总结(原理、危害、防御)-程序员宅基地