BA 5013 皮带输送机减速机 H2SE, B..H, B..M, B..E, T3.H, T3.M T3.H, 4..28[手册]pdf,
”h'ba'se“ 的搜索结果
BA 5033 (EX) 皮带输送机减速机 B..H, B..M, B3.E, T3.H, T3.M 4...28[手册]pdf,
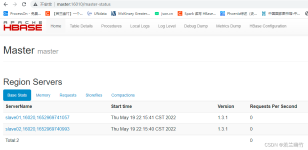
HBase几种安装方式
标签: hbase
protel99se封装库器件PCB2D库芯片封装库400个(protel库) BAT_N BAT-socket BDKG BGA-16-14 BGA-81 C4X7 C5X8 C6X8 C8X8MM C8X10 C8X12 C10x16 C13x20 C23x20 C0402 C0402S C0603 C0805 C1206 C1206A C1210 C2225 C...
BA 5013 皮带输送机减速机 H2SE, B..H, B..M, B..E, T3.H, T3.M T3.H, 4..28[手册]pdf, 相关下载链接://download.csdn.net/download/weixin_38744153/11725687?utm_source=bbsseo


Hive驱动jar包;连接Hbase数据库所需的驱动;使用方法查看readme,或者留言,有空的话本人会回复你的哈

SLAM--G2o实现BA优化
标签: slam

h3c服务器设置pxe启动 内容精选换一换规划数据服务器与集群处于同一内网,数据服务器IP为192.168.0.90,导出数据文件格式为CSV,所以规划的并行导出模式为Remote模式。Remote模式并行导出数据操作示例如下所示:以...
h3c 设置虚拟服务器 内容精选换一换通过云服务器或者外部镜像文件创建私有镜像时,如果云服务器或镜像文件所在虚拟机的网络配置是静态IP地址时,您需要修改网卡属性为DHCP,以使私有镜像发放的新云服务器可以动态...
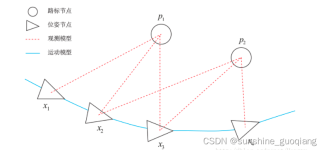
1.投影模型和BA代价函数 这个流程就是观测方程 之前抽象的记为: \(z = h(x, y)\) 现在给出具体的参数话过程,x指此时相机的位姿R,t,它对应的李代数为\(\xi\)。路标y即为这里的三维点p,而观测数据则是像素坐标(u,...

1.投影模型和BA代价函数 这个流程就是观测方程 之前抽象的记为: \(z = h(x, y)\) 现在给出具体的参数话过程,x指此时相机的位姿R,t,它对应的李代数为\(\xi\)。路标y即为这里的三维点p,而观测数据则是像素坐标...
文章内容症状Bu makalede, bir Dell bilgisayardaki HDMI (Yüksek Çözünürlüklü Multimedya Arabirimi) bağlantı noktası ile ilgili en sık sorulan soruların yanıtları sunulmaktadır Bu makale, ...

采用逆深度参数表达的BA问题导数推导 由于大部分的slam算法均采用逆深度参数表达地图点的结构,但是网上对该方法的介绍比较少因此本文将详细说明其推导过程。逆深度参数表达具有优化变量少、能表达非常远的点以及...
对陕西省渭北主要煤田主采煤层中的As、Pb、Hg、Cd、Se、Cu、Sr、Ba、B等微量元素的分析结果表明;渭北原煤中Hg、Se、As、Pb、B含量明显高于地壳平均值,呈富集状态;Co、Cd与地壳平均值接近,Cu、Zn、Sr、Ba等元素均...
对话屏幕Dynpro(SE51)屏幕元素屏幕属性l 屏幕序号(Screen number)。四个数字组成的序列号,用于在程序中确定屏幕,该序号在同一个ABAP程序内部是唯一的。l 屏幕类型(Screen type)。ABAP中的屏幕类型包括普通...
原理挺简单的,但是这文章有点难啃,好多东西该讲没讲,该描述没描述。COLMAP 的整体流程非常王道,在此不做赘述。
ICP(Iterative Closest Point... 误差模型 线性解SVD,非线性解BA #include <iostream> #include <opencv2/core/core.hpp> #include <opencv2/features2d/features2d.hpp> #include <...
PnP( Perspective-n-Point )是求解3D到2D点对运动的方法。PnP可以再很少的匹配点中获得较好的运动估计,是最重要的一种姿态估计方法。 PnP问题有多种解法,通用的算法有P3P、EPnP、DLT、UPnP、MRE等,其中P3P、...
H. Oppermann *, a, N. SoÈ gerb, M. Binnewiesb, AN Rykovc, KO Znameskovc, AN BA Kuznetzovc, a Pop Dresden, Institut fuÈovc r 汉诺威工业大学无机化学研究所,莫斯科大学无机化学研究所/俄罗斯,莫斯科国立...
推荐文章
- python win32api win32gui win32con 窗口句柄 发送消息 常用方法 键盘输入-程序员宅基地
- 基于jsp的户籍管理系统设计与实现(项目报告+答辩PPT+源代码+数据库+截图+部署视频)_户籍管理系统java实训报告-程序员宅基地
- CentOS 7.0 配置subversion-程序员宅基地
- python十六进制转pcap文件_将十六进制字符串转换为Scapy中的数据包 - python-程序员宅基地
- qt 控件设置相对位置_Qt Designer 修改窗体大小改变控件位置-程序员宅基地
- php生成6位id,6位极品微信号?微信号id名字大全-程序员宅基地
- 天河安装CESM2.1.3_cesm 天河-程序员宅基地
- 【论文笔记】知识图谱推理PRA——Relational retrieval using a combination of path-constrained random walks_pra算法-程序员宅基地
- Linux进程调度策略的发展和演变--Linux进程的管理与调度(十六)_什么时候重新计算所有进程的时间片(即counter的值)?如何计算?处于等待状态的进程-程序员宅基地
- 二月英语学习总结_rosettastone学习心得-程序员宅基地