一般是joint_state_publisher数量大于1个,这样导致tf监听出现错误。
”robot_model_and_robot_state“ 的搜索结果

将之前一次运动的目标点设置成下一次运动的起点: ...robot_state::RobotState start_state(*group.getCurrentState()); const robot_state::JointModelGroup *joint_model_group = start_state.getJointMo...
节点相关介绍: elevation_mapping 这是该工程最主要的节点,该节点主要使用距离传感器,机器人姿态、方差信息,建立一个具有方差的高程图 订阅话题: /points(sensor_msgs/PointCloud2) 距离传感器所测量的...
Robot Framework报错 No keyword 常见的解决办法
系列文章目录 提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加 TODO:写完再整理 文章目录系列文章目录前言一、ros_control目的二、ros_control架构1、控制器管理器2、控制器3、硬件抽象层4、...
将功能包下载到项目根目录 git clone ...catkin_make #修改所有者 赋予执行权限 zw 为所有者 sudo chown -R zw arbotix_ros/ sudo chmod -R +x arbotix_ros/ 在第一节的模型基础上修改launch文件 ...<l
ROS2-rviz2显示模型
标签: 机器人

在机器人操作系统(ROS)中,经常需要模拟机器人运动,那么首先需要新建一个机器人。 创建简单的机器人模型的步骤如下: (1)创建硬件描述包 (2)建立urdf文件 (3)建立launch命令文件 (4)效果演示详细步骤...

对于文件系统问题,ROSWTF查看您的环境变量,软件包配置,堆栈配置等。它还可以接收一个Roslaunch文件,并尝试在其中找到任何潜在的配置问题,例如尚未正确构建的软件包。例如,如果您在导航堆栈中运行它,它将根据...
move_group_interface_tutorial.cpp #include <moveit/move_group_interface/move_group_interface.h> #include <moveit/planning_scene_interface/planning_scene_interface.h> ...
本文以Franka机器人为例简述基本的机器人末端力/力矩控制方法,以及阻抗控制方法。本文假设读者具有一定的机器人学与C++程序设计基础。笔者基于libfranka 0.8.0 版本进行开发调试
C++中贝叶斯滤波器包bfl的使用(2)-预测模型非线性的扩展卡尔曼滤波器
nav2_collision_monitor碰撞监视器是一个节点,为机器人提供了一个额外的安全级别。它使用来自传感器的数据,执行若干与避免碰撞相关的任务,绕过成本图和轨迹规划器,监测是否需要紧急停止或者减速。



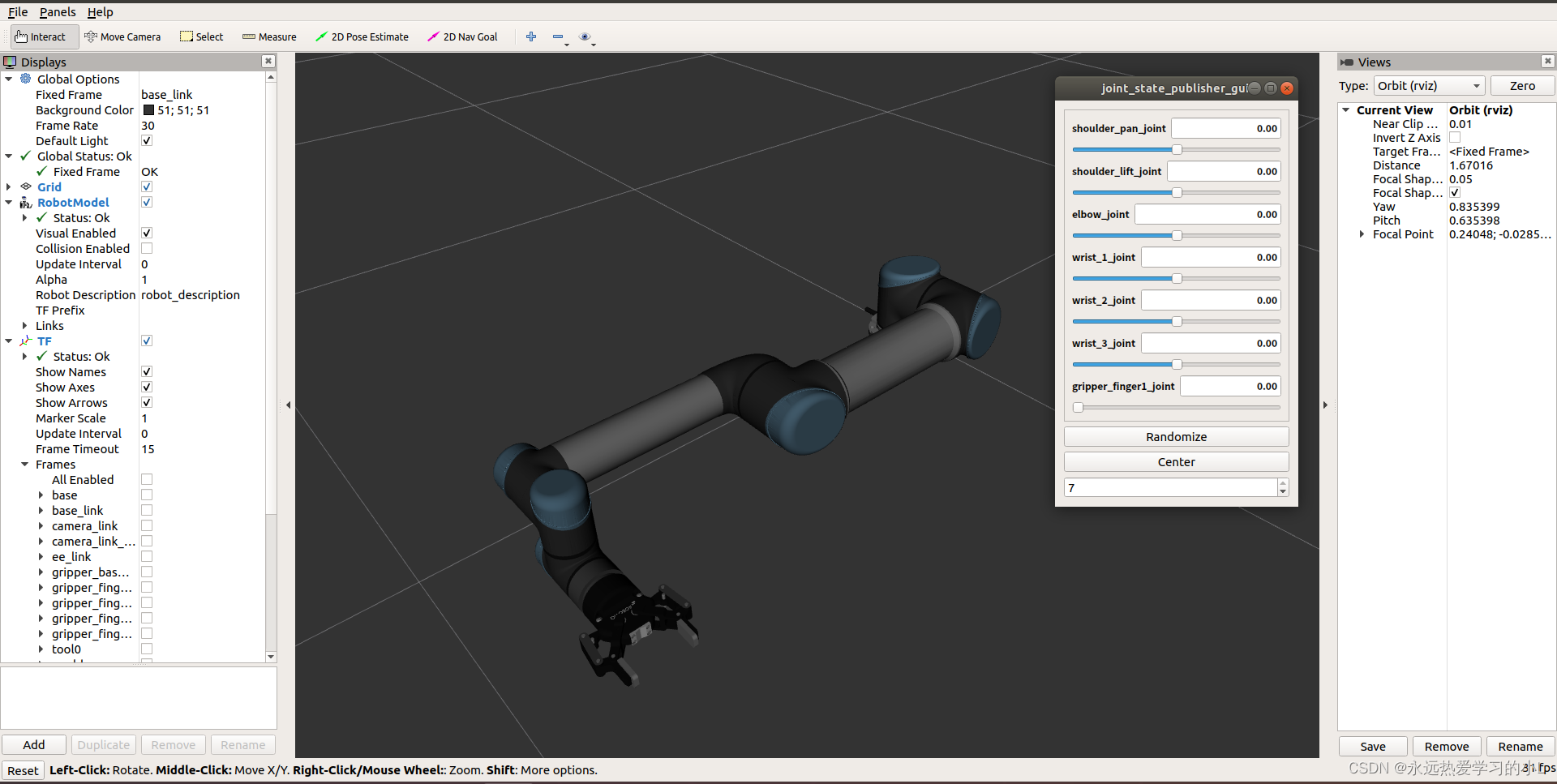
ROS: URDF自定义robot model -----解决WARN:No tf data. Actual error: Fixed Frame [base_link] does not exist 和 joint_state_publisher 控制URDF机械臂模型运动:解决URDF模型不随joint_states运动问题 中,在...
Robot_localization是一个基于卡尔曼滤波ROS的包,可以对里程计 imu gps多种传感器进行数据融合,进而完成机器人的定位的算法。对于不懂卡尔曼滤波的小伙伴,通过修改配置文件就能顺利的使用大佬们造好的轮子,极大...
文章目录1. Controllers2. 硬件接口 Hardware Interfaces3. 控制器管理器 Controller Manager命令操作4. 传动系统Transmissions5. 关节约束Joint Limits6. gazebo_ros_control添加传动系统添加gazebo_ros_control...
在本教程中,我们要修改我们在...现在,我们将探索其他三个重要类型的连接:continuous, revolute and prismatic. Make sure you have installed all prerequisites before continuing. See the previous tutorial...
环境:ubuntu16.04 ros-kinetic gazebo7.16 turtlebot_teleop包 注意,代码中使用到的中文注释,使用时候一定要删除,否则会报错的. 来源: 以前编写机器人urdf时候,关节控制器编写,控制器yaml编写,把控制器正常加载到ros...
在之前几篇的博客中,我们要启动小车摄像头模型,yolo检测,python文件,都需要打开三个终端,依次输入命令,这样显得比较麻烦,我们现在就先将这三个命令合在一起,一个命令启动小车摄像头模型及yolo检测,python...
此博文主要是用来记录ROS-Kinetic 中,用于机器人轨迹规划的MoveIt功能包的学习记录。 ... 引: Planning Scene这个教程主要是通过手工配置方式,检查机器人是否发生本体各连杆之间碰撞,是否与仿真环境内其他物品...
1 started roslaunch server http://tang-ThinkPad:43487/ 2 3 SUMMARY 4 ======== 5 6 PARAMETERS ... 7 * /joint_state_publisher/use_gui: False 8 * /move_group/allow_trajectory_exe...
在上一章中我们创建了一个自己的机器人,同时这个机器人也能在gazebo中运动,这里我们继续给这个机器人添加一些传感器信息。 1、camera 首先我们来添加一个传感器信息,我们建立一个xacro文件,...robot xmlns:xacr...
ROBOTIS OP3启动 如何执行默认demo 如何执行GUI程序 如何使用offset tuner
1 编译KDL parser $ rosdep install kdl_parser This will install all the external dependencies for the kdl_parser.... $ rosmake kdl_parser ...2 在你的程序中使用 ...首先,在你的package.xml文件中添加the KDL ...
推荐文章
- 如何将xml转换为json_xml转json-程序员宅基地
- TCP 的那些事 | TCP报文格式解析_.tcp文件是图片吗-程序员宅基地
- python——stack()和unstack()用法_unstack函数-程序员宅基地
- C语言调用sqlite3命令语句实现将txt文件导入到数据库中_从txt导入到sqlite-程序员宅基地
- AOP与OOP有什么区别,谈谈AOP的原理是什么,大厂Android高级面试题汇总解答-程序员宅基地
- 最小费用流_单向图费用流-程序员宅基地
- Python中的5个高阶概念属性的知识点!你要了解明白哦!_python属性的五大类-程序员宅基地
- python 基于PHP+MySQL的装修网站的设计与实现_python抓取装修需求-程序员宅基地
- ubuntu完美的nvidia驱动安装方式(ubuntu16+驱动410+cuda10.0)or(ubuntu16+驱动455+cuda11.1)_乌班图英伟达驱动选着哪个版本-程序员宅基地
- 解决redis超时io.lettuce.core.RedisCommandTimeoutException: Connection timed out after 5s-程序员宅基地