选用旋转矩阵公式中5保5,生成单式 100 注,共计金额 200元:01,02,03,04,05,09 01,02,03,04,05,11 01,02,03,04,06,10 01,02,03,04,07,0801,02,03,04,09,10 01,02,03,05,06,10 01,02,03,05,07,...
”旋转“ 的搜索结果
计算机图形学图形旋转 计算机图形学| 回转 (Computer Graphics | Rotation) Rotation is a type of transformation that is very often used in computer graphics and image processing. Rotation is a process of ...
Unity_物体旋转方法归纳
标签: unity
0、旋转的三种方式 1、矩阵旋转 2、欧拉旋转 会造成万向节锁问题 3、四元数旋转 可避免万向节锁现象 1、方法1 Transform.rotation / Transform.localRotation 旋转角度 void Update() { if (Input....

PCL点云库——旋转平移矩阵
标签: 矩阵

本文以及接下来的几篇文章重点介绍一下关于旋转的变换,包括二维旋转变换、三维旋转变换以及它的一些表达方式(旋转矩阵、四元数、欧拉角等)。 2. 绕原点二维旋转 首先要明确旋转在二维中是绕着某一个点进行旋转...
把脚本挂到摄像机上即可,设置一下需要限制角度的区间值。此脚本中有加入滑动条来显示摄像机缩放,如不需要可删除。注:需要引入DoTween插件,如不需要相机复位功能,可删除代码段,不引入DoTween...

python Open3D模块中的四元数、欧拉角、旋转向量转旋转矩阵


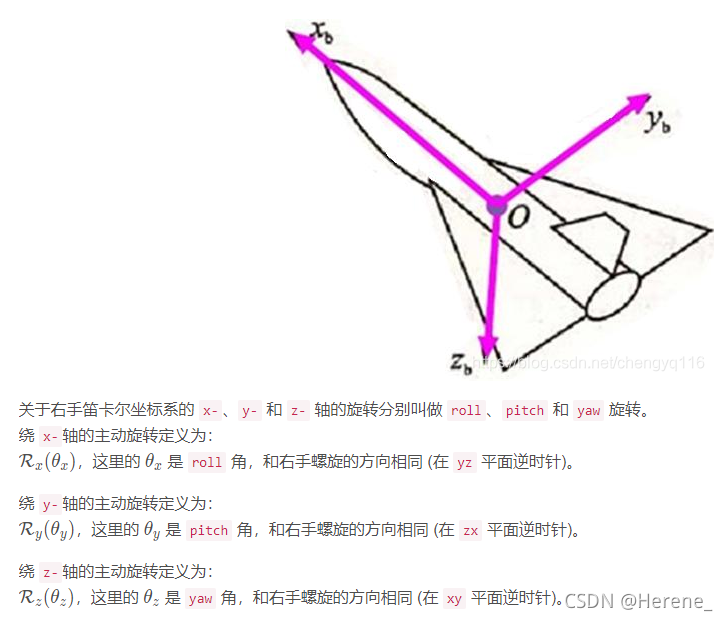
欧拉角是一种表示三维旋转的描述方法,欧拉角的计算需要借助旋转矩阵,关于旋转矩阵的知识可先参考之前的文章:3维旋转矩阵推导与助记 欧拉角旋转 静态定义 对于在三维空间里的一个参考系,任何坐标系的取向,都可以...
物体的旋转
首先,通过旋转矩阵不能直观地看出旋转的方向和角度,假设给定一个旋转矩阵,要求旋转方向不变,旋转角度变成一半,那么新的旋转矩阵计算起来就比较麻烦了。 另一方面,旋转变换本身只有3个自由度,但旋转矩阵有9个...

css图片360°自动旋转
本文以及接下来的几篇文章重点介绍一下关于旋转的变换,包括二维旋转变换、三维旋转变换以及它的一些表达方式(旋转矩阵、四元数、欧拉角等)。 2. 绕原点二维旋转 首先要明确旋转在二维中是绕着某一个点进行旋转...

旋转变换(一)旋转矩阵 1. 简介 计算机图形学中的应用非常广泛的变换是一种称为仿射变换的特殊变换,在仿射变换中的基本变换包括平移、旋转、缩放、剪切这几种。本文以及接下来的几篇文章重点介绍一下关于旋转的...





使用opencv函数的转置操作+翻转操作实现旋转 使用numpy.rot90实现 def rotateAntiClockWise90(img_file): # 顺时针旋转90度 img = cv2.imread(img_file) trans_img = cv2.transpose(img) img90 = cv2.flip(trans_...

旋转,应该是三种坐标变换——缩放、旋转和平移,中最复杂的一种了。大家应该都听过,有一种旋转的表示方法叫四元数。按照我们的习惯,我们更加熟悉的是另外两种旋转的表示方法——矩阵旋转和欧拉旋转。矩阵旋转使用...
罗德里格斯公式Rodrigues: 代码: import numpy as np ... # 旋转是过原点的,n是旋转轴 r = np.array(r).reshape(3, 1) rx, ry, rz = r[:, 0] M = np.array([ [0, -rz, ry], [rz, 0, -rx],
搞懂欧拉角、旋转矩阵、四元数
标签: 线性代数
推荐文章
- Pytorch Dataloader 模块源码分析(二):Sampler / Fetcher 组件及 Dataloader 核心代码-程序员宅基地
- Asp类型判断及数组打印-程序员宅基地
- Adroid Studio 2022.3.1 版本配置greendao提示无法找到_plugin with id 'org.greenrobot.greendao' not found-程序员宅基地
- esxi查看许可过期_解决Vsphere Client 60天过期问题-程序员宅基地
- CMake_cmake_module_path-程序员宅基地
- 生产者消费者模型-程序员宅基地
- Adaptive AUTOSAR 解决方案 INTEWORK-EAS-AP_autosar的eas-程序员宅基地
- 穿山甲SDK错误码40025_穿山甲sdk错误码4025-程序员宅基地
- css firefox下的兼容问题_css 只用于firefox-程序员宅基地
- 【Python】对大数质因数分解的算法问题_python分解多个质因数代码-程序员宅基地