张正友标定法 论文 相机标定
标签: 相机标定
张正友标定法论文 张正友标定法论文 张正友标定法论文 张正友标定法论文 张正友标定法论文 张正友标定法论文 张正友标定法论文
标签: 相机标定
张正友标定法论文 张正友标定法论文 张正友标定法论文 张正友标定法论文 张正友标定法论文 张正友标定法论文 张正友标定法论文
opencv:26mm matlab:15mm;(包含两张图片);可直接打印使用 opencv:26mm matlab:15mm;(包含两张图片);可直接打印使用
关于matlab相机标定,使用两种方法,一种是直接使用matlab的标定工具包,一种是使用Toolbox_calib进行标定。
标签: 单目相机 标定 改进的张氏方
改进的张氏单目相机标定方法。自带二维标定板,可运行,有数据、有文档讲解
标签: GML 相机标定工具
本相机标定工具名字是GML,非常有用,测量很准确。 采用OPENCV编写,是安装在Windows平台的软件。 本工具非常好用,有使用说明文档。 需要的朋友可以免费下载。
针对现有图像拼接算法在配准精度和速度方面的不足,提出了一种利用相机标定信息和相位相关技术相结合的图像配准方法,并给出了算法的详细推导过程。算法通过相机标定获得投影矩阵、相机坐标系间的旋转变换矩阵和平移...
c++程序,vs2017上运行,可以由双目相机拍得的照片任意一点求取该点的三维坐标,误差在1%左右。
标签: 相机标定
相机机械手标定详细介绍,包括机械手和轴卡的标定.
标签: 标定参数
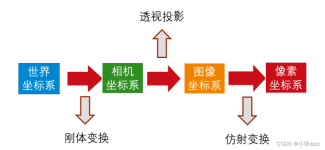
文档对相机标定中的内部参数和外部参数进行了详细解释; 相机标定:4个坐标系之间的转换,参数解释,畸变矫正公式。

自己动手实现相机标定,包括Homograph、相机内参、外参、畸变系数的求解,另外构建最小二乘问题进行了两次优化
标签: 相机标定
基于OPENCV与VS2010,实现对相机畸变参数的计算,标定, 基于OPENCV与VS2010,实现对相机畸变参数的计算,标定 基于OPENCV与VS2010,实现对相机畸变参数的计算,标定

张正友相机标定Opencv实现,附棋盘图和14张不同角度标定图。 包含完整的工程代码,有详细的注释说明,一键运行。实现了相机标定、输出相机内参、外参、旋转和平移矩阵、标定效果评价、以及使用标定结果对原始棋盘图...
OpenCV相机标定包括普通相机标定和鱼眼相机标定,其中普通相机标定参考的是张正友标定法,而鱼眼相机的标定是基于等距投影模型进行标定的. 普通相机标定 张正友标定法 (1) 针孔模型内外参标定 针孔相机投影模型方程...
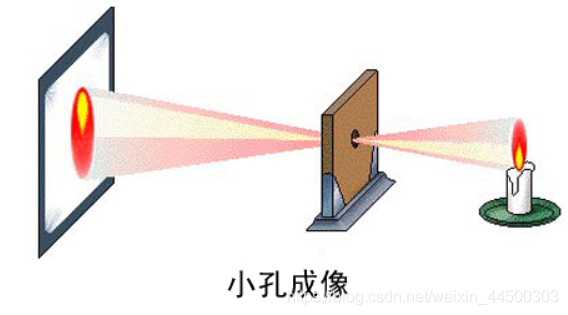
相机标定原理,相机针孔模型,小白初始相机标定,相机标定原理,相机针孔模型,小白初始相机标定,
现有双目相机标定的方法是通过矩阵变换求得各个相机间的旋转平移关系,再通过优化求得最终参数。非线性优化步骤多,相机内外参数与镜头畸变存在耦合,时间花费较大。提出一种畸变矫正与平面单应性矩阵结合的双目相机...
OpenCV耦合改进张正友算法的相机标定算法.pdf
主要介绍了Python opencv相机标定实现原理及步骤详解,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友可以参考下
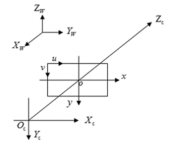
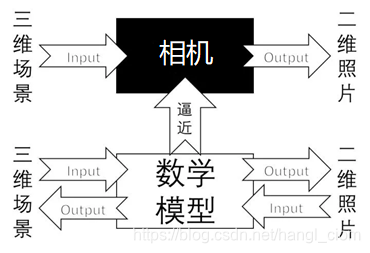
相机的数学意义:相机标定的意义小孔成像说明必知的专用术语:在双目或多目系统中,世界坐标系和相机坐标系是不重合的,。上图二维平面中,OiO_{i}Oi为图像坐标系原点,OdO_{d}Od是像素坐标系,像素坐标系相对于...
相机标定。