
”相机标定“ 的搜索结果
使用MATLAB标定工具箱完成相机的的内外参数的获取。
在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定(或摄像机标定)。无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定...
这是一份相机标定的程序代码,在机器视觉处理图像上用于标定相机!
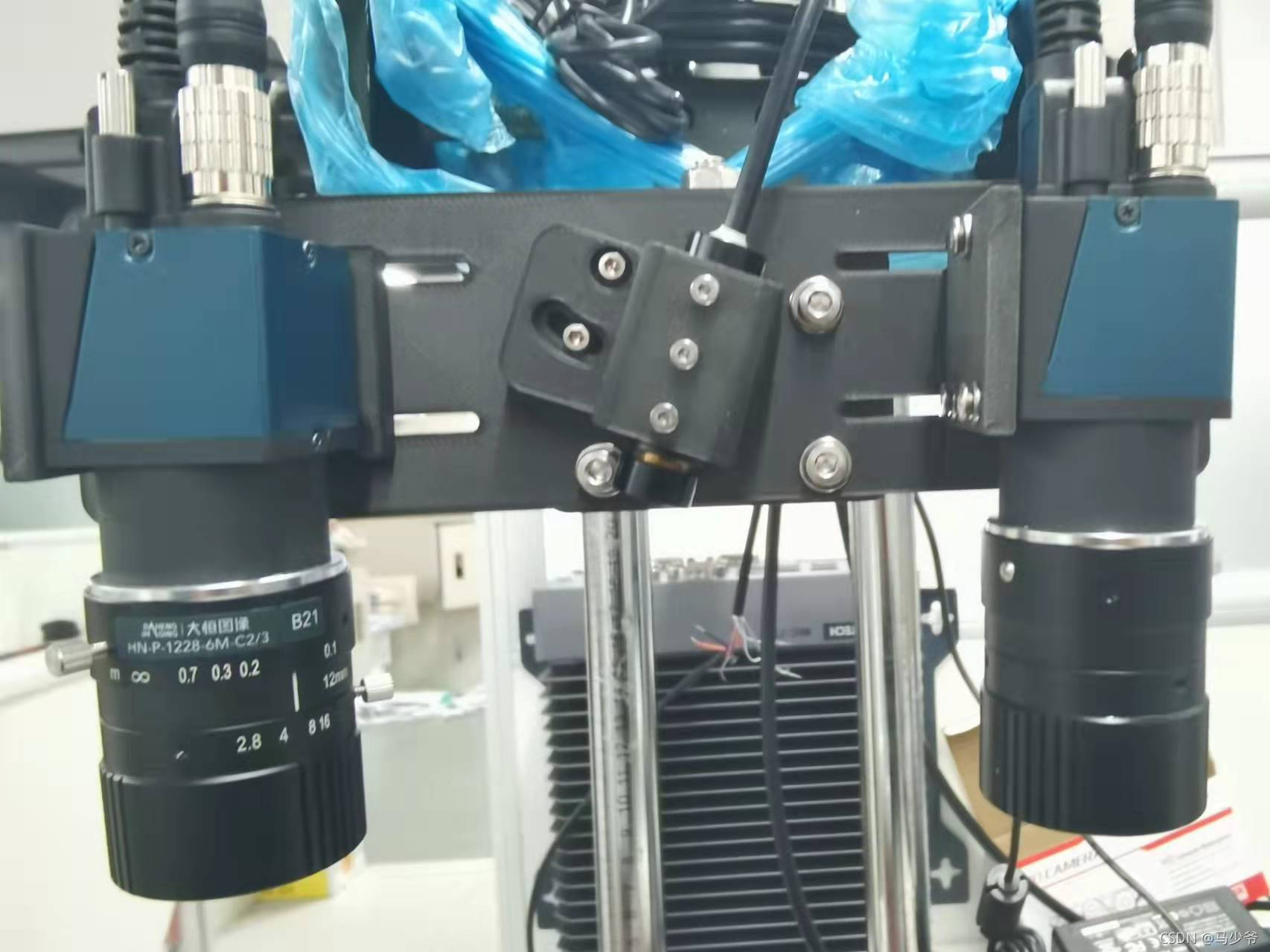
使用usb-cam发布ros图像,在其launch文件中设置分辨率的宽度为2倍...双目分为单设备和多设备,我们的双目相机是单设备,也就是双目图像拼接在一起。再写ros包分割拼接在一起的双目图像。安装完成后使用已有数据包测试。
相机标定,使用一个已知的物体长度,测量出图像中其余任意物体长度
机械臂正常输出机械臂末端姿态,搭载相机————通过相机对物体进行位姿检测,输出参数————输出机械臂末端的位置参数————(重复:采集...最常用的相机标定的方法:张正友相机标定法(原理:利用棋盘格标定板。
opencv相机标定opencv相机标定opencv相机标定opencv相机标定
该资源主要是针对双目相机标定,可以进行计算机视觉的下一步工作
参照opencv及网上资料基于opencv3.0编写,标定结果与matlab2015一致,欢迎交流!
python相机标定 采用的是张正友方法,参考以下文章:https://github.com/Nocami/PythonComputerVision-6-CameraCalibration 在该方法的基础上实现了批量的定标,便于软件设计。 # -*- coding: utf-8 -*- from cv2 ...
HALCON进行相机标定,并且矫正,转换成c++语言在vs上跑(用vs2010的编译环境,然后调用halcon视觉库就可以了)
双目相机标定理论总结
标签: 计算机视觉


张正友相机标定Opencv实现,附棋盘图和14张不同角度标定图。 包含完整的工程代码,有详细的注释说明,一键运行。实现了相机标定、输出相机内参、外参、旋转和平移矩阵、标定效果评价、以及使用标定结果对原始棋盘图...
相机标定系列(三)利用matlab进行相机标定 文章目录相机标定系列(三)利用matlab进行相机标定前言一、棋盘格图像的采集二、单目相机标定2.读入数据总结 前言 matlab的应用程序中含有对双目相机和单目相机的标定...


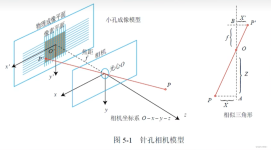
相机的内外参与相机标定 我们所生活的现实世界是一个三维的世界,人类生活期间,已经能够熟练地估计周围物体的深度及定位,但是,现在的照相机一般都只能拍摄二维图像,场景从三维变到二维的时候,一个最重要的信息...
最完整相机标定过程(百度网盘源代码+工程分享)-附件资源

适用于使用TSAI法标定相机!本人主页的标定参数代码使用!
matlab 相机标定工具箱,有一定的学习价值
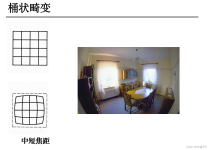
相机标定是准确确定相机和镜头模型参数的过程。对于针孔模型,这相当于确定合适的相机模型的参数。至少是焦距 fff,可能还有中心点坐标 (cx,cyc_x, c_ycx,cy) 和镜头畸变参数 k\boldsymbol{k}k。 在最常见的离线...
CalTech某小组开发的单目/双目相机标定MATLAB工具包。标定的核心算法为张正友的棋盘格标定法。完整帮助文档见工具包内Readme.txt。
推荐文章
- NSFuzz:TowardsEfficient and State-Aware Network Service Fuzzing-程序员宅基地
- 刘睿民畅谈大数据:政府应紧急设立首席数据官-程序员宅基地
- nginx 编译安装依赖包_nginx编译怎么添加新的依赖库-程序员宅基地
- Python+OpenCV+Tesseract实现OCR字符识别_python + opencv + tesseract-程序员宅基地
- 微型计算机主板上的主要部件,微型计算机主板上安装的主要部件-程序员宅基地
- 推荐一款可匹敌国际大厂的国产企业级低无代码平台_国产私有化 无代码-程序员宅基地
- UE4 蓝图 实现 数组的边遍历边删除_ue4 数组删不掉-程序员宅基地
- python爬虫之bs4解析和xpath解析_from bs4 import beautifulsoup xpath-程序员宅基地
- MySQL配置环境变量-程序员宅基地
- VGG16进行微调,训练mnist数据集_vgg16 tensorflow 2 mnist-程序员宅基地