”通讯“ 的搜索结果
基于JAVA的网络通讯系统设计与实现简介 随着信息技术的飞速发展,网络通讯已成为现代社会不可或缺的一部分。基于JAVA的网络通讯系统,以其跨平台性、稳定性以及高效性等特点,成为了企业、组织乃至个人进行远程通讯...
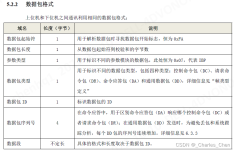
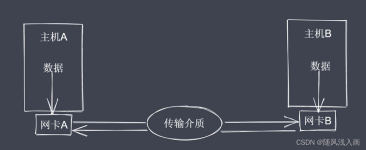
串口通讯详解,串口通信数据格式,串口通信的优点与缺点
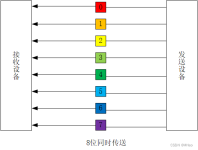
并行通讯:同一时刻可以传输多位数据位的数据二、按照数据通讯的方向来区分 全双工:在同一时刻内,两个设备可以同时收发设备 半双工:两个设备之间可以收发数据但不能在同一时刻进行 单工: 在任何时刻都只能...
经过两个星期的实际测试,已经可以稳定通讯了,可以读M,Y,X,D,DD,S,R,以及批量读取功能,经自己测试,已经可以使用了,请放心下载。 里面已经标注使用方法,都有中文注释,经测试,可以与H5U与H3U稳定通讯,并且已经...
C#上位机通过TCP通讯与库卡机器人连接,可实时返回机器人各关节位置,返回位置可导出为.CSV文件; 通过上位机控制机器人,实现各关节单步运动及当前位置到给定坐标的点运动两种形式; 资源包括【KUKA端】、【PC端】...
C#利用VISA与仪器通讯编程实例,VISA通讯包含USB/串口/GPIB/LAN,通讯,一般电子类测量仪器都是采用这些通讯方式,比如泰克,keithley,是德,安捷伦,普源等等知名仪器公司都是采用VISA标准来设计软件和仪器通讯,...
C#实现各大厂商PLC通讯 1、C#实现与欧姆龙PLC串口、以太网通讯 2、C#实现与三菱PLC通讯,基于MXComponent 3、C#实现与西门子PLC串口、以太网通讯S7300/S71200/S71500 4、C#实现与AB PLC串口、以太网通讯AB500/AB5000
发那科机器人与上位机 视觉SOCKET通讯,收发数据,套接字通讯,读写寄存器变量,IO信号,系统变量。
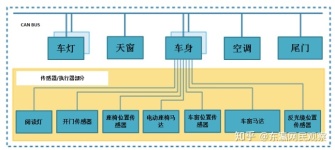
基于C#的CAN通讯示例,实现CAN通讯的写入读出,测试通过。
FANUC机器人的TCP/IP通信设置,用于FANUC机器人与第三方(上位机、视觉等)应用通信的指导文档,中文版
Qt上位机软件串口通讯,视频源码,免费下载,视频上我的b站主页找https://space.bilibili.com/401094174
modbus rtu通讯,有需要的同学可以下载来使用。是源码,没有废话。
ABB机器人二次应用开发,实现与ABB机器人的通讯,及控制移动,一个可独立运行的小程序,对ABB机器人应该都能识别。
基恩士上位机TCP通讯协议,有了这份协议就可以实现上位机TCP协议和基恩士PLC直接通信,不需要购买其他软件了!数据结构简单清晰,一目了然。
基于EthernetKRL库卡机器人tcp通讯软件,利用c#编程,实现上位机和库卡机器人的tcp/ip通讯。本人程序员宅基地有写相关讲解文章。 包含c#程序,机器人程序src文件,数据文件dat,xml文件
KUKA机器人官方教材,值得拥有! 对于KRC4库卡机器人系统如何进行EtherNetIP通讯配置进行详解!
VB.NET、C#等PC高级语言与三菱FX5U通讯的源代码,采用TCP方式,支持整数、双整数、浮点数据; 无须安装,直接复制到项目工程即可,支持ASCII和二进制两种格式;
提供一种有效的KUKA库卡机器人与PC机的通讯方法,亲测有效。
代码很全,非常详细,用C#开发VISA 仪器设备进行通讯提供了详细的实例,可以参考一下 学习一下
1、包含C#实现OPCUA的Server和Client的核心代码。 2、包含C#统一接口规范封装后的应用代码。
最近做了一个库卡机器人通过EtherNet/IP与工业相机进行通讯的项目,分享供大家参考
C++实现蓝牙bluetooth通讯功能,基础功能实现,源代码,
ABB与PC通讯,里面是ABB的程序,在ABB机械臂上测试通过,相较于论坛和github上其接受和发送数据的过程程序较简单,无注释,可以在robotstudio里的help查看函数的介绍
多个西门子1200PLC ModbusTCP通讯实例,西门子PLC通讯实例
简单介绍安川与PC使用socket通讯逻辑,有安川机械臂程序和注释,无PC程序
西门子S7-1500和S7-1200Profinet通讯(图文并茂)
推荐文章
- 大数据和云计算哪个更简单,易学,前景比较好?_大数据和云计算哪个好-程序员宅基地
- python操作剪贴板错误提示:pywintypes.error: (1418, 'GetClipboardData',线程没有打开的剪贴板)...-程序员宅基地
- IOS知识点大集合_ios /xmlib.framework/headers/xmmanager.h:66:32: ex-程序员宅基地
- Android Studio —— 界面切换_android studio 左右滑动切换页面-程序员宅基地
- 数据结构(3):java使用数组模拟堆栈-程序员宅基地
- Understand_6.5.1175::New Project Wizard_understand 6.5.1176-程序员宅基地
- 从零开始带你成为MySQL实战优化高手学习笔记(二) Innodb中Buffer Pool的相关知识_mysql_global_status_innodb_buffer_pool_reads-程序员宅基地
- 美化上传文件框(上传图片框)_文件上传框很丑-程序员宅基地
- js简单表格操作_"var str = '<table border=\"5px\"><tr><td>序号</td><-程序员宅基地
- Power BI销售数据分析_powerbi汇总销售人员业绩包括无销售记录的人-程序员宅基地